Supporting materials
Download
Download this article as a PDF





Where do astronauts get their food? What happens to their waste? Adam Williams from the European Space Agency in Darmstadt, Germany, describes the development of an unmanned shuttle to supply the International Space Station.

Imagine a double-decker bus driving from the outskirts of London to Wembley Stadium. We pick up its journey just outside Windsor (where the Queen lives), 30 km from Wembley, and watch as it drives slowly into the centre of London. As it reaches Hanger Lane, around 3.5 km from its destination, it pauses for a few minutes, before continuing along the North Circular Road and up Harrow Road, until it is within sight of the stadium, about 0.25 km away. Finally it spends almost half an hour inching its way to a reserved parking slot. Once it is safely parked, we look inside the bus – and realise there is no driver.
Now move this journey 350 km into space, and substitute, for the stationary Wembley Stadium, the International Space Station (ISS), which covers approximately the same area as the football pitch but moves at over 27 000 km/hour. The bus-sized vehicle approaching the ISS is the Automated Transfer Vehicle (ATV), designed by the European Space Agency (ESA) to fly to, and automatically dock with, the ISS. During its final approach it glides in with a relative speed of less than 0.25 km/hour, and with a positional accuracy of better than 10 cm.
The ISS is a multi-national project aimed at building and sustaining a laboratory in which experiments can be performed in microgravity. Gravity on the ISS is not completely zero, because of very small forces caused by such things as the mass of the ISS itself and reaction to friction from the atmosphere. The experiments have been concerned mainly with the long-term effects of microgravity on the human body. Scientists also plan to use the ISS to examine the effect of microgravity on the physics of fluids, on combustion and on the behaviour of aerosols, ozone, water vapour and oxides in Earth’s atmosphere, as well as cosmic rays, cosmic dust, anti-matter and dark matter in the Universe.

The long-term goals of this research are to develop the technology necessary for human-based space and planetary exploration and colonisation (including life support systems, safety precautions and environmental monitoring in space, for example), new ways to treat diseases, more efficient methods of producing materials, more accurate measurements that would be impossible to achieve on Earth, and a more complete understanding of the Universe.
The ISS will have a permanent crew of six astronauts (until April 2009 there will be only three crew members permanently on board). Crew and supplies are transported to and from the ISS using either the NASA Space Shuttle or the Russian Space Agency Soyuz vehicle. Supplies can also be transferred using the unmanned Russian Progress vehicle.
The ATV – the most complicated spacecraft ever built, launched and operated by the European Space Agency – will supplement these vehicles, and help to pay ESA’s share of the ISS operating costs.

Several ATVs are planned. The first, named Jules Verne after the famous French science fiction writer, will be launched on an Ariane 5 launcher from French Guyanaw1. As this article was prepared, the launch was planned for 9 March 2008 and the ATV was scheduled to dock with the ISS on 3 April 2008w2.
Vehicles that dock with the ISS normally have some manual control of the final docking manoeuvres. The Space Shuttle and Soyuz are controlled by a pilot on board; Progress is controlled by ISS crew members. ATV will be the first vehicle to dock completely automatically. Although the ATV will be monitored closely during its approach and docking by ground controllers and ISS crew, it is designed to handle autonomously any emergency situation without damaging itself or the ISS, or endangering the ISS crew.
ATV is designed to carry over nine tonnes of experiments, equipment, fuel, water, food and other supplies from Earth to the ISS orbiting around 350 km above Earth. The first flight cargo will include spare parts for the European Columbus laboratoryw3 and the ATV itself, personal items for the crew, and a luxury 19th century edition of the book De la Terre à la Lune (From the Earth to the Moon) written by Jules Verne.

Once attached to the ISS, ATV will become a 22 m3 extension to the ISS, providing extra living space for the ISS crew. While attached, the cargo of experiments will be transferred to the ISS, along with more than 810 kg of water, 100 kg of nitrogen, oxygen and air and nearly 860 kg of ISS propellant. ATV will also use its thrusters to correct and adjust the orbit of the 400 tonne ISS. This is necessary because even though there is only a very small amount of atmosphere at an altitude of 350 km, the ISS is so big that is causes some drag. Every so often, the ISS needs to be boosted up to a higher altitude, from where it drifts lower and lower. Without this, the ISS would eventually fall out of the sky. ATV will also be used for emergency manoeuvres, such as those required if a piece of space debris is predicted to hit the ISS.
After about six months, ATV will be loaded with solid and liquid waste from the station (use your imagination! Those empty tanks may as well store something). It will then be undocked from the ISS, and directed back towards Earth where it will burn up harmlessly in the atmosphere over an uninhabited area of the Pacific Ocean.
Since ATV will approach and be attached to the ISS, the safety of the crew onboard the ISS is paramount. Most spacecraft functions are doubly redundant, meaning that each subsystem, unit, switch and valve is duplicated so that the spacecraft can withstand any single failure. When people are involved, systems must be triply redundant; ATV is thus designed to cope with two simultaneous failures. This obviously increases the cost and weight of the spacecraft, although it is difficult to quantify by how much.
For example, ATV has a thruster system with main and redundant thrusters to guide it as it docks with the ISS. In case both the main and redundant thrusters fail, it has a separate alternative thruster system, controlled by completely different hardware and software.
This system will be used particularly if it appears that ATV is not going to dock properly with the ISS. This could be due to a system failure within ATV or because its velocity is not as expected, or may be necessary if there is an independent problem on the ISS (such as a fire alarm). Ground controllers at the ATV Control Centre in Toulouse, France, the ISS crew or ATV itself can instruct the thruster system to steer the vehicle safely away from the ISS. The controllers then assess the situation. If fully understood and correctable, they would instruct ATV to circle above and behind the ISS and come back for a second attempt. If not fully understood, ATV would be parked 2000 km ahead of the ISS for further investigation.
Much of the complexity of the Jules Verne mission comes from proving that these safety systems work correctly. Only when all of the vital safety operations have been demonstrated to perform flawlessly, will ATV be allowed to dock with the ISS (see box ‘Training for launch’).

Before ATV can be launched, the ground control teams at the ATV Control Centre in Toulouse, France, together with ISS control teams in Houston, USA, and Moscow, Russia, plus representatives of the ISS crew, need to undergo a series of training simulations. The following gives a flavour of what they go through during a typical simulation day.
05.00 CET: An operator in Toulouse starts the simulator, which simulates the ATV spacecraft, the ISS, the US satellite communications network TDRS, the ESA communications satellite Artemis and parts of the ESA and Russian Ground Station network. It comprises three parts, running in three control centres. In Moscow and Houston other operators also prepare their computers, ready for a multi-national training session.
06.30: The teams arrive for the briefing. The intercom system connecting the sites is checked.
06.52: There are difficulties with the simulator in Toulouse, delaying the start of the simulation. The operator spends anxious minutes tracking down the problem. If the simulator cannot start properly, it will be necessary to reconvene scores of engineers who have gathered around the globe to participate.
08.05: The GO button is pressed, and the simulators begin sending data. Docking will occur in about seven hours; before then, the simulation covers an approach to the ISS, culminating in an ‘Escape’ manoeuvre which proves that docking can be stopped if necessary.
08:41: The training instructors in each control centre privately confer over the impact of the delayed start. Houston can only participate for eight hours, after which their facilities are required for Shuttle training. The instructors decide to advance one of the planned contingencies to ensure that the necessary training is achieved.
11.28: ATV starts a series of homing boosts. A problem is reported with data from the communications centre in Oberpfaffenhofen, Germany. Unknown to the trainees, a failure in the communications link between Oberpfaffenhofen and Toulouse has been introduced. There is a flurry of calls over the intercom, and ground controllers rapidly deal with the problem.
14.18: ATV approaches the ISS, gathering calibration data for the optical sensors used to control the final docking. Suddenly an urgent voice can be heard on the intercom: “This is an emergency”. Toulouse has lost all communication with the spacecraft.
14.25: The failure is traced to a problem with TDRS – deliberately injected by the instructor. He judges how long to leave the teams in this critical situation, and then fixes the problem. Now Toulouse must command ATV to pull away from the ISS and repeat the closing manoeuvre, to gather again the vital calibration data lost during the communications outage.
15.29: The planned ‘Escape’ manoeuvre is commanded. ATV manoeuvres harmlessly away from the ISS and the simulation is over. The flight directors and training instructors have a four-way discussion over the intercom system, identifying the key successes and failures, and anything that needs to be improved or changed.
Despite a delayed start, and a long, hard day, the team are clearly pleased with their achievements. They mill around the main control room, congratulating themselves on having dealt successfully with the problems thrown at them. They have demonstrated their expertise in controlling the most complex spacecraft ESA has ever built, and as their confidence grows, they move one step closer to the ATV mission.
The mission will start with the launch and early operations phase (LEOP), when the spacecraft will be put into a low Earth orbit by an Ariane 5 launcher. This is probably the riskiest part of the mission, especially until ATV has deployed its four solar array panels used to generate the power necessary to control the spacecraft. Although ATV has batteries to provide power until the solar arrays are available, they will eventually run out of power; if the arrays don’t work, the spacecraft would fail and the whole mission would be lost.
After LEOP, the spacecraft will perform a series of manoeuvres to bring its orbit in phase with the ISS, approaching it from behind and slightly below.
The approach to the ISS will be characterised by a series of waypoints and station keeping points (see box ‘Approaching the ISS’). About 15 days after launch, the final approach and rendezvous will begin and ATV will automatically dock with the ISS (see box ‘Russian docking system’) following checks at each station keeping point. ATV is designed to cope with a vast range of simultaneous problems without causing damage to itself or the ISS. Everything is autonomous – the control team and crew are there just to keep an eye on things in case something goes wrong.
Once attached, the spacecraft will be monitored using data sent via the ISS to the control centre in Toulouse; the software on board ATV and in Toulouse can detect unexpected situations – anything from the air circulation fans failing to a fire.
Finally, all good things must come to an end. ATV will undock from the ISS and plunge to its fiery demise in the upper atmosphere. But this is no one-off mission. The design and operations concept proved during the Jules Verne mission will be used to build and fly at least four more ATV spacecraft. Subsequent ATVs will be launched approximately once a year, resupplying the ISS and providing vital support to the ISS programme into the next decade.
ATV’s journey to the ISS will be characterised by a series of station keeping points – places in space where ATV pauses and ground controllers check that everything is OK before continuing. This could be compared with a postman delivering mail. The postman doesn’t know if a fierce dog is locked up or is going to attack him: he gets to the end of the road (pauses and checks everything is OK); he gets to the gate (pauses and checks again); he gets to the front door step (pauses again); he opens the letter box and posts the letter. If at any point the dog appears (or it starts raining, he drops the postbag or he finds the address is wrong), he runs away!
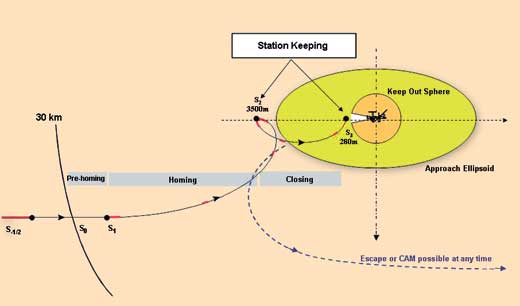
The station keeping points are numbered from S-5, which is the start of proximity operations with the ISS (ATV is then around 100 km from the ISS), to S41, which is only 12 m from docking.
When ATV reaches S-1/2 (around 40 km behind and 5 km below the ISS), global positioning system receivers on ATV and the ISS will be used to calculate their relative positions. ATV will then pass through S0 (30 km from the ISS) and stop at station keeping point S2, located 3.5 km behind and 100 m above the ISS.
When all checks at S2 have been completed, an ‘Escape’ manoeuvre will be initiated to demonstrate the correct operation of the safety manoeuvre, after which ATV will circle around the ISS and return to S-1/2. Two days later, a second demonstration phase will be initiated. This time, ATV will approach S3, 280 m behind the ISS.
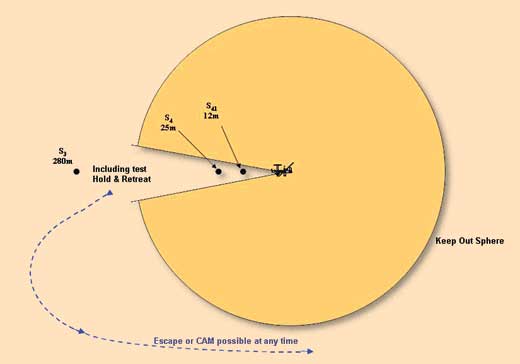
Further checks will be performed at S3, and ATV will switch to using a visual system to control its final approach. Before docking can be attempted, a series of hold and retreat commands will be demonstrated, to ensure that the crew or ground controllers can stop an unsuccessful docking attempt if necessary. Having successfully retreated to S3, ATV will continue to S4, which is 25 m from the ISS, and then to S41, a mere 12 m away. Again, a retreat to S4 will be commanded, and finally an ‘Escape’ manoeuvre, the ultimate abort test, which will leave ATV again circling the station and returning to S-1/2.
At last, the final approach will be commanded, and ATV will dock with the ISS.
The ATV docking system is a Russian system, also used on Russian vehicles, and designed for use with the docking port on the Russian ISS module.
As ATV approaches the ISS, a probe at the front of the vehicle is extended. The tip of the probe has sensors which detect contact with the docking port on the ISS.
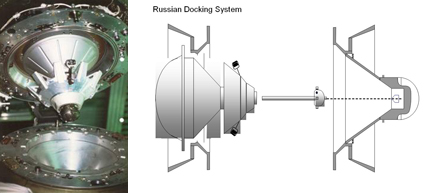
Then contact is detected, the ATV initiates a thrust which pushes the vehicle into the docking port. When the probe reaches the end of the docking port cone, the vehicle brakes and latches on the probe engage with the docking port.
The probe is then retracted, which brings ATV and ISS together, after which hooks on ATV automatically engage with the ISS. Finally, hooks on the ISS engage with the ATV, and the two bodies become a single rigid structure.
The article is mainly about the automated transfer (space) vehicle (ATV), designed to dock automatically with the International Space Station (ISS). Though there are aspects of ATV’s trajectory between launch and docking that relate to pre-university physics (mechanics), the topic of most interest – to technology teachers – may be the sensing and control systems.
The purpose of the ISS, on the other hand, includes a number of aspects of interest to teachers of pre-university physics – and a further article devoted to the ISS is planned for a future issue.
Even so, many science (and technology) teachers will enjoy this article and some learners will find it of much interest too. Below are some ideas about how it could be used.
‘The effect of microgravity on the physics of fluids, on combustion, on the behaviour of aerosols’ – this could lead to a group discussion on what the effect might be (for instance, in the cases of convection, a burning candle, and diffusion in a gas, respectively).
‘Cosmic rays, cosmic dust, anti-matter, and dark matter in the Universe’ – students could do library or web research on the nature (and importance) of these, leading perhaps to class presentations.
The sensing and control aspect would be suitable for technology rather than science curricula – and there is enough here for a whole lesson of varied activities and approaches.
Eric Deeson, UK
Download this article as a PDF