Supporting materials
Download
Download this article as a PDF





Traducido por Antonio Gallego. ¿Dónde consiguen los astronautas su comida? ¿Qué pasa con sus desperdicios? Adam Williams, de la Agencia Espacial Europea en Darmstadt, Alemania, describe la creación de una lanzadera no tripulada para abastecer la Estación Espacial Internacional.

Imagina un autobús de dos pisos que va de las afueras de Londres al estadio de Wembley. Empezamos el trayecto justo en Windsor (donde vive la reina), a 30 km de Wembley. Observa cómo se adentra lentamente en el centro de Londres. Cuando alcanza Hanger Lane, a unos 3’5 km de su destino, se detiene unos minutos antes de continuar por la North Circular Road y subir por Harrow Road, hasta divisar el estadio, a unos 0’25 km de él. Por último, emplea casi media hora en llegar con gran dificultad a la plaza de aparcamiento que tiene reservada. Una vez felizmente aparcado, miramos dentro de él ¡y comprobamos que no lleva conductor!
Traslada ahora este viaje al espacio, a 350 km de altura, y sustituye el inmóvil estadio de Wembley por la Estación Espacial Internacional (ISS, en inglés), que cubre aproximadamente la misma área de un campo de fútbol pero que se mueve a más de 27.000 km por hora. El vehículo – del tamaño de un autobús – que se aproxima a la ISS es el Vehículo Automatizado de Transporte (ATV), diseñado por la Agencia Espacial Europea (ESA) para ir a la ISS y atracar en ella, todo de forma automática. Durante la aproximación final, se desliza a una velocidad relativa de menos de 0’25 km por hora y con un margen de error en la posición inferior a 10 cm.
La ISS es un proyecto multinacional encaminado a crear y mantener un laboratorio en el que puedan llevarse a cabo experimentos en microgravedad. La gravedad en la ISS no es totalmente nula, debido a las pequeñas fuerzas causadas por cosas como la masa de la propia ISS y la reacción a la fricción con la atmósfera. Los experimentos están relacionados sobre todo con los efectos a largo plazo de la microgravedad sobre el cuerpo humano. Los científicos cuentan también con usar la ISS para examinar los efectos de la microgravedad en la física de los fluidos, la combustión, el comportamiento de los aerosoles, el ozono, el vapor de agua y los óxidos en la atmósfera terrestre, así como los rayos cósmicos, el polvo cósmico, la antimateria y la materia oscura en el Universo.

Los objetivos a largo plazo de esta investigación son el desarrollo de la tecnología necesaria para la exploración y colonización humana del espacio y los planetas (incluyendo por ejemplo sistemas de apoyo a la vida, precauciones de seguridad y seguimiento del medio ambiente en el espacio), nuevas formas de tratar enfermedades, métodos más eficientes de producción de materiales, mediciones más precisas, imposibles en la Tierra, y una comprensión más completa del Universo.
La ISS tendrá un tripulacción permanente de 6 astronautas (hasta Abril del 2009 habrá sólo tres tripulantes permanentes a bordo). La tripulación y los suministros se llevan y traen desde la ISS usando o la Lanzadera Espacial de la NASA o el vehículo Soyuz de la Agencia Espacial Rusa. Los suministros pueden transportarse también usando el vehículo ruso no tripulado Progress.
El ATV – la nave espacial más compleja jamás construida, lanzada y manipulada por la Agencia Espacial Europea – se añadirá a los anteriores vehículos y ayudará a pagar la parte correspondiente a la ESA de los costes de mantenimiento de la ISS.
Están planeados varios ATVs. El primero, denominado Julio Verne por el célebre escritor francés de ciencia ficción, será lanzado en un Ariane 5 desde la Guayana francesaw1. Cuando se escribía este artículo, el lanzamiento estaba planeado para el 9 de Marzo del 2008 y su atraque en la ISS estaba previsto para el 3 de Abril del 2008w2.

Los vehículos que atracan en la ISS tienen normalmente control manual para las maniobras finales del atraque. La Lanzadera Espacial y el Soyuz son controlados por un piloto a bordo; el Progress lo controla la tripulación de la ISS. El ATV será el primer vehículo en atracar de forma totalmente automática. Aunque el ATV será seguido de cerca durante su aproximación y atraque por controladores en la Tierra y por la tripulación de la ISS, está diseñado para enfrentarse de forma autónoma a cualquier situación de emergencia, sin dañarse a sí mismo ni dañar a la ISS o poner en peligro a la tripulación de ésta.
El ATV está diseñado para transportar más de 9 toneladas de experimentos, equipo, fuel, agua, alimentos y otros suministros desde la Tierra a la ISS, en órbita a 350 km de la Tierra. El cargamento del primer vuelo incluirá repuestos para el laboratorio europeo Columbusw3 y para la propia ATV, objetos personales para la tripulación y una edición de lujo, del siglo XIX, del libro De la Terre à la Lune de Julio Verne.
Una vez anclado a la ISS, el ATV se convierte en una extensión de 22 m3 de la ISS, suministrando un espacio extra a su tripulación. Seguirá anclado hasta que se traslade a la ISS su carga de experimentos, junto con algo más de 810 kg de agua, 100 kg de nitrógeno, oxígeno y aire y cerca de 860 kg de combustible. Además, el ATV usará sus propulsores para corregir y ajustar la órbita de esa mole de 400 toneladas que es la ISS. Esto es necesario porque, aunque la densidad atmosférica a 350 km de altura es mínima, la ISS es tan grande que eso supone algo de resistencia. Cada cierto tiempo la ISS ha de ser empujada hacia una mayor altura, desde la que de nuevo se irá deslizando muy poco a poco. Sin eso, la ISS acabaría cayéndose del cielo. El ATV se usará además para maniobras de emergencia, como las requeridas cuando se prevé que alguna pieza de basura espacial va a chocar con la ISS.
Tras unos seis meses, el ATV se cargará con desechos sólidos y líquidos de la estación (¡usa tu imaginación! Esos tanques vacíos pueden también almacenar ciertas cosas). Entonces será soltado de la ISS y encaminado de vuelta a la Tierra donde se desintegrarà sin riesgos en la atmósfera, en una zona deshabitada del Pacífico.

Ya que el ATV se acercará y acoplará a la ISS, es primordial la seguridad de la tripulación a bordo. La mayor parte de las funciones de las naves espaciales son doblemente redundantes; lo que significa que cada subsistema, unidad, enchufe o válvula va por duplicado, para que la nave pueda afrontar cualquier fallo una vez. Cuando están en juego las personas, los sistemas deben ser triplemente redundantes; así el ATV está diseñado para afrontar dos fallos simultáneos. Esto obviamente aumenta el coste y el peso de la nave, aunque es difícil precisar cuánto.
Por ejemplo, el ATV lleva un sitema de propulsión con propulsores principales y redundantes, para guiarlo mientras atraca en la ISS. En caso de que fallaran ambos, los principales y los redundantes, todavía lleva aparte un sistema alternativo de propulsores, controlado por sistemas de hardware y software totalmente independientes.
En particular, ese sistema se usará si se aprecia que el ATV no se va a acoplar adecuadamente a la ISS. Eso podría deberse al fallo de algún sistema en el ATV o a que su velocidad no es la esperada; o puede ser necesario si independientemente aparece un problema en la ISS (como una alarma de fuego). Los controladores del Centro de Control en Toulouse, Francia, la tripulación de la ISS o el propio ATV pueden dar instrucciones al sistema de propulsores para alejar el vehículo de la ISS de forma segura. Los controladores evaluarán entonces la situación. Si se aclara del todo y es corregible, darían instrucciones al ATV para dar vueltas por encima y detrás de la ISS y pasar a un segundo intento. Si no se aclara totalmente, el ATV sería aparcado a 2000 km por delante de la ISS para continuar la investigación.
Gran parte de la complejidad de la misión Julio Verne proviene de comprobar si esos sistemas de seguridad funcionan bien. Sólo cuando se haya comprobado que todas las operaciones vitales de seguridad se llevan a cabo de forma impecable se permitirá al ATV atracar en la ISS (ver el recuadro «Entrenándose para el lanzamiento»).

Antes de poder lanzar el ATV, los equipos de control en la Tierra, situados en el Centro de Control del ATV de Toulouse en Francia, junto con los equipos de control de la ISS de Houston en USA y de Moscú en Rusia, además de los representantes de la tripulación de la ISS, han de someterse a una serie de simulacros de entrenamiento. Lo que sigue da una idea de las cosas por las que pasan en una típica jornada de simulacros.
05.00 CET: Un operador en Toulouse arranca el simulador, que simula la nave espacial ATV, la ISS, la red de comunicaciones por satélite de Estados Unidos TDRS, el satélite de comunicaciones Artemis, de la ESA, y partes de la red de la Estación Terrestre de Rusia y de la ESA. Se compone de tres partes, que funcionan en tres centros distintos de control. En Moscú y Houston otros operadores ponen a punto también sus ordenadores para una sesión multinacional de entrenamiento.
06.30: Legan los equipos para recibir instrucciones. Se revisa el sistema intercom que conecta los distintos lugares.
06.52: Hay dificultades con el simulador de Toulouse, lo que retrasa el comienzo de la simulación. El operador emplea unos minutos angustiosos en rastrear el problema. Si el simulador no logra arrancar adecuadamente, será necesario volver a convocar a montones de ingenieros, que participan desde distintas partes del globo.
08.05: Se pulsa el botón de INICIO y los simuladores empiezan a mandar datos. El atraque tendrá lugar unas siete horas después; antes de eso, la simulación incluye un acercamiento a la ISS, que culmina con una maniobra de «Escape»con la que se comprueba que el atraque puede detenerse si fuera necesario.
08:41: Los instructores del ensayo en cada centro de control discuten en privado el impacto del retraso en el arranque. Houston sólo puede participar durante 8 horas, después de las cuales sus aparatos se precisan para el ensayo de la Lanzadera. Los instructores deciden adelantar una de las contingencias planeadas, para asegurar que se logra el entrenamiento preciso.
11.28: El ATV comienza una serie de intentos de retorno. Se declara un problema con los datos procedentes del centro de comunicaciones de Oberpfaffenhofen, en Alemania. Sin saberlo los participantes, se ha introducido un fallo en el enlace de comunicaciones entre Oberpfaffenhofen y Toulouse. Hay una lluvia de llamadas en el intercom y los controladores de tierra se ocupan rápidamente del problema.
14.18: El ATV se aproxima a la ISS, reuniendo los datos de calibrado requeridos por los sensores ópticos usados para controlar el atraque final. De repente suena en el intercom una voz apremiante: «Esto es una emergencia». Toulouse ha perdido todas las comunicaciones con la nave espacial.
14.25: El fallo se localiza en un problema con el TDRS – introducido adrede por el instructor. Pondera el tiempo que debe dejar a los equipos en esa situación crítica y luego soluciona el problema. Ahora Toulouse debe ordenar al ATV que se aleje de la ISS y repita la maniobra de acercamiento, para reunir de nuevo los vitales datos de calibrado perdidos durante el corte de las comunicaciones.
15.29: Se ordena la planeada maniobra de «Escape». El ATV maniobra sin problemas alejándose de la ISS y la simulación se da por terminada. Los directores de vuelo y los instructores del ensayo mantienen una discusión a cuatro bandas por el intercom, para identificar los aciertos y fallos claves y cualquier cosa que precise ser mejorada o cambiada.
Pese al retraso inicial y a la larga y dura jornada, el equipo está claramente satisfecho con sus logros. Deambulan por la sala principal de control, felicitándose por haber afrontado con éxito los problemas planteados. Han demostrado su preparación para controlar la nave espacial más compleja jamás construida y, a medida que crece su confianza, avanzan un paso más hacia la misión ATV.
La misión dará comienzo con el lanzamiento y la fase de primeras operaciones (LEOP, en inglés) en que la nave espacial será colocada en una órbita terrestre de baja altura por una lanzadera Ariane 5. Esta es quizá la parte más arriesgada de la misión, sobre todo hasta que el ATV haya desplegado sus cuatro paneles solares destinados a generar la potencia necesaria para controlar la nave. Aunque el ATV lleva baterías para suministrar corriente hasta que las placas solares entran en funcionamiento, al final las baterías se descargan; si las placas solares no funcionaran, la nave fallaría y toda la misión se perdería.
Despues del LEOP, la nave realizará una serie de maniobras para poner su órbita en fase con la ISS, aproximándose a ella por detrás y ligeramente por debajo.
La aproximación a la ISS se caracterizará por una serie de puntos de paso o puntos guardianes de la estación (ver el recuadro «Aproximación a la ISS»). Unos 15 días después del lanzamiento, se iniciarán la aproximación final y el encuentro. El ATV atracará en la ISS de modo automático (ver recuadro «sistema ruso de atraque»), aunque sometido a controles en cada punto guardián de la estación. El ATV está diseñado para afrontar un amplio espectro de problemas simultáneos sin dañar ni a la ISS ni a sí mismo. Todo es automático – el equipo de control y la tripulación sólo están para vigilar las cosas por si algo va mal.
Una vez acoplada, la nave espacial será supervisada a través de los datos enviados via la ISS al centro de control en Toulouse; el sofware del ATV y el de Toulouse pueden detectar situaciones no esperadas – cualquier cosa, desde el fallo de los ventiladores que hacen circular el aire hasta un fuego.
Al final, todo lo bueno ha de llegar a su fin. El ATV se soltará de la ISS y se lanzará a su destrucción entre llamas en la alta atmósfera. Pero ésta no es una misión excepcional. El diseño y la concepción de las operaciones probados en la misión Julio Verne se usarán para construir y fletar más naves espaciales ATV. Las siguientes se lanzarán aproximadamente una vez al año, para reaprovisionar la ISS y suministrar un apoyo vital al programa de la ISS en la próxima década.
El viaje del ATV a la ISS estará marcado por una serie de puntos guardianes de la estación – sitios del espacio donde el ATV se detiene para que los controladores de tierra comprueben que todo está bien antes de seguir adelante. Podríamos compararlo con un cartero que reparte el correo. El cartero no sabe si un feroz perro está atado o le va a atacar: va hasta el final de la calle (se para y mira si todo va bien); llega a la cancela (se para y mira de nuevo); se acerca al escalón de la puerta de entrada (otra vez se para); abre el buzón y echa la carta. Si en algún punto aparece el perro (o empieza a llover o pierde la bolsa del correo o ve que la dirección está equivocada), se aleja corriendo!
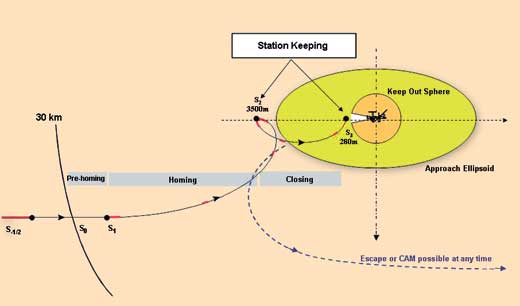
Los puntos guardianes de la estación están numerados del S-5, que marca el comienzo de las operaciones de aproximación a la ISS (el ATV está entonces a uno 100 km de la ISS), hasta el S41, que está a sólo 12 m del atraque.
Cuando el ATV alcance el S-1/2 (a unos 40 km por detrás y 5 km por debajo de la ISS), los receptores GPS del ATV y de la ISS se usarán para calcular sus posiciones relativas. Luego, el ATV pasa por el S0 (a 30 km de la ISS) y se detiene en el punto guardián S2, situado a 3’5 km por detrás y 100 m por encima de la ISS.
Una vez hechas todas las comprobaciones en S2, se iniciará una maniobra de «Escape» para probar el correcto funcionamiento de la maniobra de seguridad; tras lo cual, el ATV rodea la ISS y vuelve al S-1/2. Dos días después se iniciará una segunda fase de prueba. Esta vez el ATV alcanzará S3, a 280 m por detrás de la ISS.
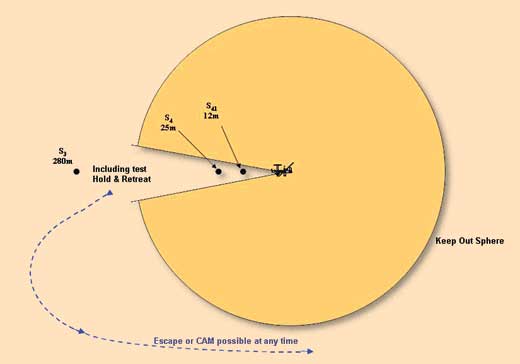
FEn S3 se harán nuevas comprobaciones y el ATV pasará a usar un sistema visual para controlar su aproximación final. Antes de poder intentar el atraque, se probará una tanda de órdenes de parar y retroceder, para asegurarse de que la tripulación o los controladores de tierra pueden detener un intento fallido de atraque si fuera necesario. Tras retroceder con éxito al S3, el ATV continuará hasta el S4, a 25 m de la ISS, y después al S41, a tan solo 12 m. De nuevo se ordenará una retirada al S4 y por último una maniobra de «Escape», último test de abortar la operación, que dejará al ATV dando vueltas de nuevo a la estación y volviendo al S-1/2.At last, the final approach will be commanded, and ATV will dock with the ISS.
Por último se ordenará la aproximación final y el ATV se acoplará a la ISS.
El sistema de atraque del ATV es ruso; lo usan también los vehículos rusos y está diseñado para usarse en el puerto de atraque del módulo ruso de la ISS.
Cuando el ATV se aproxima a la ISS, sale una sonda de la parte frontal del vehículo. La punta de esa sonda tiene sensores que detectan el contacto con el puerto de atraque de la ISS.
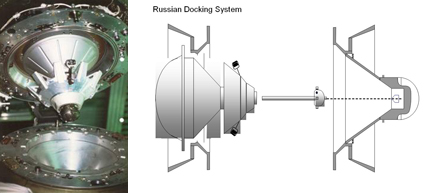
Al detectarse el contacto, al ATV enciende la propulsión que lo empuja hacia el puerto de atraque. Cuando la sonda alcanza el final del cono del puerto de atraque, el vehículo frena y los pasadores que lleva la sonda se encajan en el puerto de atraque.
Entonces la sonda vuelve a incrustrarse en el ATV, haciéndole así juntarse a la ISS; después de lo cual los ganchos que hay en el ATV se acoplan a la ISS. Finalmente, los ganchos que tiene la ISS se acoplan al ATV y los dos cuerpos se convierten en una estructura rígida.
El artículo trata básicamente del vehículo (espacial) automatizado de transporte (ATV), diseñado para acoplarse de modo automático a la Estación Espacial Internacional (ISS). Aunque hay aspectos del trayecto del ATV entre el lanzamiento y el atraque que guardan relación con física preuniversitaria (mecánica), el tema de más interés – para profesores de tecnología – podría ser el de los sistemas de detección y control.
Por otro lado, el objetivo de la ISS contiene diversos aspectos de interés para profesores de física preuniversitaria – y hay proyectado otro artículo dedicado a la ISS para un número posterior.
Aun así, muchos profesores de ciencia (y tecnología) disfrutarán con este artículo; incluso algunos alumnos lo encontrarán de gran interés. A continuación se dan algunas ideas de cómo puede usarse.
«El efecto de la microgravedad en la física de fluidos, en la combustión y en el comportamiento de los aerosoles» – esto puede llevar a una discusión en grupo sobre cuál podría ser el efecto (por ejemplo, en los casos de convección, de una vela que arde y de la difusión en un gas, respectivamente).
«Rayos cósmicos, polvo cósmico, antimateria y materia oscura en el Universo» – los estudiantes podrían buscar bibliografía o páginas web sobre la naturaleza (e importancia) de esas cosas, quizás para una presentación en clase.
El aspecto de la detección y el control sería más apropiado para cursos de tecnología que de ciencia – y aquí hay suficiente para una lección entera, con actividades y enfoques variados.
Eric Deeson, Reino Unido
Download this article as a PDF