Supporting materials
Download
Download this article as a PDF





Tradotto da Mirko Bendetti. Come si alimentano gli astronauti? Che fine fa la loro spazzatura? Adam Williams, dell’Agenzia Spaziale Europea a Darmstadt, in Germania, descrive la messa a punto di una navetta spaziale senza equipaggio che fornisce assistenza alla Stazione Spaziale…

Immaginate un autobus a due piani che si sposta dalla periferia di Londra allo stadio di Wembley. Fate conto di salire a bordo appena fuori Windsor (dove risiede la Regina), a 30 km da Wembley, e considerate il mezzo mentre si avvicina lentamente al centro di Londra. Non appena raggiunge Hanger Lane, a 3,5 km dalla sua destinazione, si ferma per qualche minuto prima di proseguire attraverso North Circular Road fino a Harrow Road, finché si posiziona in vista dello stadio, ad una distanza di circa 250 metri. Alla fine impiega quasi mezz’ora per dirigersi poco a poco verso un’area di parcheggio riservata. Quando è ben parcheggiato, guardiamo all’interno dell’autobus e ci accorgiamo che è senza conducente.
Adesso spostate questo viaggio nello spazio a 350 km di distanza e sostituite lo stadio di Wembley, che è fermo al suo posto, con la Stazione Spaziale Internazionale (ISS), che ha quasi la stessa area del campo da gioco ma si muove a una velocità di 27.000 km orari. Il mezzo delle dimensioni di un autobus che si avvicina all’ISS è il veicolo automatico di trasporto (ATV), progettato dall’Agenzia Spaziale Europa (ISS) per dirigersi e attraccare automaticamente alla Stazione Spaziale Internazionale (ISS). Durante il suo avvicinamento finale plana a una velocità relativa inferiore a 0,25 km orari e con un’accuratezza posizionale superiore ai 10 cm.
L’ISS è un progetto multinazionale che punta a costruire e mantenere in efficienza un laboratorio in cui compiere esperimenti in condizione di microgravità. A bordo dell’ISS la gravità non è del tutto assente, a causa di debolissime forze generate dalla massa stessa dell’ISS e dalla reazione alla frizione con l’atmosfera. Gli esperimenti riguardano prevalentemente gli effetti a lungo termine della microgravità sul corpo umano. Gli scienziati, inoltre, hanno progettato di utilizzare l’ISS per esaminare sia l’effetto della microgravità sulla fisica dei fluidi, sul processo di combustione e sul comportamento di aerosol, ozono, vapore acqueo e ossidi dell’atmosfera terrestre, sia i raggi e la polvere cosmica, l’antimateria e la materia oscura dell’universo.

Gli obiettivi a lungo termine di questa ricerca sono di sviluppare la tecnologia necessaria per l’esplorazione e la colonizzazione spaziale e planetaria (includendo sistemi di supporto della vita, precauzioni di sicurezza e monitoraggio ambientale nello spazio, per esempio), nuove soluzioni per il trattamento di patologie, metodi più efficienti per la produzione di materiali, misurazioni più accurate che sarebbe impossibile eseguire sulla Terra ed una migliore comprensione dell’universo.
L’ISS avrà un equipaggio permanente di 6 astronauti (saranno però soltanto in tre a bordo fino ad aprile del 2009). L’equipaggio e i materiali sono trasportati da e verso l’ISS, utilizzando o lo Space Shuttle della NASA o il veicolo dell’Agenzia spaziale russa. I rifornimenti possono essere trasportati anche con il Progress, il veicolo russo senza equipaggio.
L’ATV – la più complessa nave spaziale mai costruita – lanciata e controllata dall’Agenzia spaziale europea, s’integrerà con questi veicoli, contribuendo così al pagamento della quota dei costi gestionali dell’ISS a carico dell’ESA.
Sono previsti vari ATV. Il primo, denominato Jules Verne, dal nome del famoso scrittore di fantascienza francese, sarà lanciato su un vettore Ariane 5 dalla Guyanaw1 francese. Al momento della stesura di quest’articolo, il lancio era previsto per il 9 marzo 2008 e l’attracco dell’ATV con l’ISS programmato per il 3 aprile 2008w2.
Di solito il controllo delle manovre finali dei veicoli che attraccano all’ISS è in parte manuale. Lo Space Shuttle e il Soyuz sono governati da un pilota a bordo. Il Progress è controllato da membri dell’equipaggio dell’ISS. L’ATV, invece, sarà il primo veicolo ad agganciare l’ISS in modo completamente automatico. Anche se l’ATV sarà monitorato attentamente durante le fasi di avvicinamento e attracco, sia da controllori a terra sia dall’equipaggio dell’ISS, è comunque progettato per affrontare autonomamente ogni situazione di emergenza, senza danneggiare se stesso o l’ISS e senza mettere in pericolo l’equipaggio della Stazione spaziale internazionale.

L’ATV è progettato per trasportare più di nove tonnellate di dispositivi per esperimenti, equipaggiamento, carburante, acqua, cibo e altri rifornimenti dalla Terra all’ISS, che orbita a circa 350 km sopra il nostro pianeta. Il primo trasporto comprenderà parti di riserva per il laboratorio europeo Columbusw3 e per lo stesso ATV, oggetti personali per l’equipaggio e un’edizione di pregio del XIX secolo del volume De la Terre à la Lune (Dalla Terra alla Luna), scritto da Jules Verne.
Una volta attraccato all’ISS, l’ATV diventerà una sua estensione, fornendo altri 22 m3 di spazio abitabile all’equipaggio della stazione. Durante l’attracco il carico di dispositivi per esperimenti sarà trasferito sull’ISS, insieme a più di 810 kg d’acqua, 100 kg di azoto, ossigeno e aria e quasi 860 kg di propellente per l’ISS. L’ATV utilizzerà anche i suoi propulsori per correggere e regolare l’orbita delle complessive 400 tonnellate dell’ISS. Quest’operazione è necessaria perché, anche se a 350 km di altitudine la densità dell’atmosfera è minima, l’ISS è così grande da causare comunque un po’ di attrito. Ogni tanto la stazione deve essere sospinta a una quota più elevata, da cui poi tende a spostarsi nuovamente sempre più in basso. Senza questa correzione, col tempo, l’ISS potrebbe cadere dal cielo. L’ATV sarà utilizzato anche per manovre di emergenza, come quelle richieste nel caso in cui si prevista la collisione di un detrito spaziale con l’ISS.
Dopo circa sei mesi l’ATV sarà caricato con rifiuti solidi e liquidi provenienti dalla stazione (usate la vostra immaginazione! Quei serbatoi vuoti possono pure ospitare qualcosa). L’ATV sarà poi sganciato dall’ISS e inviato di ritorno sulla Terra, dove brucerà nell’atmosfera, senza causare danni, sopra un’area disabitata dell’Oceano Pacifico.
Dato che l’ATV dovrà avvicinarsi ed essere agganciato all’ISS, la sicurezza dell’equipaggio a bordo della stazione è fondamentale. Di norma la maggior parte delle funzioni dei veicoli spaziali è raddoppiata, nel senso che ogni sottosistema, unità, interruttore e valvola è duplicato, così da permettere alla nave spaziale di fronteggiare adeguatamente ogni singolo guasto. Quando ci sono di mezzo delle persone, però, i sistemi devono essere triplicati; ecco perché l’ATV è progettato per fronteggiare due guasti contemporanei. Questa sua caratteristica, ovviamente, aumenta il costo e il peso della navicella, anche se è difficile stabilire esattamente in che misura.

Per esempio l’ATV è dotato di un sistema di spinta costituito da propulsori principali e secondari che lo controllano quando attracca all’ISS. Nel caso in cui andassero fuori uso sia i propulsori principali sia quelli secondari, si attiva un altro sistema di spinta indipendente, controllato da hardware e software completamente autonomi.
Questo sistema sarà utilizzato soprattutto nel caso di un attracco difettoso dell’ATV con l’ISS. Si tratta di un’eventualità che potrebbe verificarsi in seguito ad un guasto di sistema all’interno dell’ATV o perché la sua velocità non è conforme a quella prevista o a causa di un problema indipendente sull’ISS (come un allarme antincendio). I controllori di terra, presso il Centro di controllo dell’ATV a Tolosa, in Francia, l’equipaggio dell’ISS o anche l’ATV stesso sono in grado di impartire istruzioni al sistema di spinta, per dirigere il veicolo lontano dall’ISS in tutta sicurezza. I controllori possono quindi procedere a una verifica dell’inconveniente. Se ne capiscono esattamente la natura e lo ritengono correggibile, danno istruzioni all’ATV affinché giri sopra e dietro l’ISS, così da tornare ad effettuare un secondo tentativo. Se invece l’inconveniente non è individuato con precisione, l’ATV viene parcheggiato 2000 km più avanti dell’ISS per ulteriori controlli.
Gran parte della complessità della missione Jules Verne dipende proprio dalla verifica del corretto funzionamento di questi sistemi di sicurezza. Soltanto quando tutte le operazioni di sicurezza dimostrano di funzionare correttamente, l’ATV è autorizzato ad attraccare all’ISS (vedi il box “Allenamento per il lancio”).

Prima che l’ATV possa essere lanciato, le équipe di controllo di terra, presso il Centro di controllo dell’ATV a Tolosa, in Francia, insieme ai team di controllo dell’ISS a Houston, negli Stati Uniti, e a Mosca, in Russia, oltre a rappresentanti dell’equipaggio dell’ISS, devono sottoporsi a una serie di simulazioni di addestramento. Il resoconto che segue dà un’idea delle loro attività durante una tipica giornata di simulazione.
05.00 CET: Un operatore a Tolosa avvia il simulatore, che riproduce il veicolo spaziale ATV, l’ISS, la rete statunitense di comunicazioni satellitari TDRS, il satellite per le comunicazioni Artemis, dell’ESA, e parti della rete di stazioni terrestri russe e dell’ESA. Il simulatore è costituito da tre parti, che funzionano in tre distinti centri di controllo. Anche altri operatori a Houston e a Mosca preparano i loro computer, pronti per una sessione internazionale di addestramento.
06.30: I team si riuniscono per il briefing. Viene controllato il sistema di collegamento che connette le varie postazioni della simulazione.
06.52: Alcuni inconvenienti al simulatore di Tolosa ritardano l’inizio dell’attività di addestramento. L’operatore passa minuti carichi di ansia alla ricerca del problema. Se il simulatore non può essere avviato correttamente, sarà necessario riunire nuovamente decine d’ingegneri, che sono convenuti da varie parti del globo per partecipare.
08.05: Si preme il bottone INIZIO e i simulatori cominciano a inviare i dati. L’attracco è previsto entro circa sette ore; prima di allora, la simulazione include un avvicinamento all’ISS, culminante in una manovra “di fuga”, che comprova la possibilità di interrompere l’attracco, se necessario.
08:41: Gli istruttori dell’esercitazione in ogni centro di controllo discutono sulle conseguenze del ritardo nell’inizio della simulazione. Houston può prendere parte all’esercitazione soltanto per otto ore, dopodiché i loro sistemi saranno impegnati nelle attività di addestramento dello Shuttle. Gli istruttori decidono di anticipare uno degli imprevisti in programma, per assicurare il conseguimento dei necessari livelli di addestramento.
11.28: L’ATV inizia una serie di propulsioni autoguidate. È segnalato un problema con i dati dal centro di Oberpfaffenhofen, in Germania. All’insaputa dei partecipanti alla simulazione, è stato introdotto un inconveniente nei collegamenti tra Oberpfaffenhofen e Tolosa. Parte una raffica di chiamate e i controllori di terra affrontano rapidamente il problema.
14.18: L’ATV si avvicina all’ISS, raccogliendo dati per tarare i sensori ottici utilizzati per controllare l’attracco finale. Improvvisamente si sente una voce allarmata che esclama dall’interfono: “Questa è un’emergenza”. Tolosa ha perso la comunicazione col veicolo spaziale.
14.25: L’inconveniente è fatto risalire a un problema col TDSR, intenzionalmente causato dall’istruttore. È lui che valuta quanto tempo lasciare i team in questa situazione critica e che poi risolve il problema. Adesso Tolosa deve impartire all’ATV istruzioni per allontanarsi dall’ISS e ripetere la manovra finale, così da raccogliere ancora i dati di calibrazione persi durante l’interruzione delle comunicazioni.
15.29: Si dà il via alla manovra “di fuga” prevista dal programma. L’ATV si allontana senza inconvenienti dall’ISS e la simulazione ha termine. I direttori di volo e gli istruttori avviano una discussione a quattro attraverso l’interfono, per individuare punti di forza e criticità, e ogni altro fattore che richieda miglioramenti o modifiche.
Nonostante il ritardo nell’avvio della simulazione e un lungo giorno di duro lavoro, i team sono chiaramente soddisfatti dei loro risultati. Si aggirano per la stanza di controllo principale congratulandosi a vicenda per aver fronteggiato con successo le criticità cui sono stati sottoposti. Hanno dimostrato la loro abilità nel controllare il più complesso veicolo spaziale mai costruito dall’ESA e, poiché la loro confidenza col mezzo cresce, si avvicinano di altro passo alla missione ATV.
La missione avrà inizio con la fase del lancio e delle prime operazioni (LEOP), quando il veicolo spaziale sarà lanciato su un’orbita vicina alla Terra grazie a un vettore Ariane 5. Questa è probabilmente la parte più rischiosa della missione, specie finché l’ATV non ha dispiegato i suoi quattro pannelli solari, utilizzati per generare l’energia necessaria a controllare la nave spaziale. Anche se l’ATV è dotato di batterie che forniscono energia finché i pannelli solari non sono disponibili, queste sono desinate a scaricarsi; se quindi i pannelli non funzionassero, la nave spaziale andrebbe fuori uso e l’intera missione sarebbe compromessa.
Dopo la fase LEOP, la nave spaziale eseguirà una serie di manovre per portare la sua orbita a coincidere con quella dell’ISS, avvicinandola posteriormente e leggermente da sotto.
L’avvicinamento all’ISS sarà caratterizzato da una serie di fasi intermedie e di fermate di controllo (vedi il box “Avvicinamento all’ISS”). L’avvicinamento finale e il rendezvous inizieranno circa 15 giorni dopo il lancio e l’ATV attraccherà automaticamente all’ISS (vedi il box “Il Sistema di attracco russo”), eseguendo dei controlli ad ogni tappa intermedia. L’ATV è progettato per fronteggiare una vasta gamma di problemi simultanei, senza causare alcun danno a se stesso o all’ISS. Funziona tutto automaticamente – il team di controllo e l’equipaggio devono soltanto sovrintendere le operazioni nel caso qualcosa vada storto.
Dopo l’attracco, la nave spaziale sarà monitorata utilizzando i dati inviati dall’ISS al Centro di controllo di Tolosa; il software a bordo dell’ATV e a Tolosa può individuare situazioni impreviste – dai guasti ai ventilatori per la circolazione dell’aria agli incendi.
Da ultimo, tutte le cose belle sono destinate a finire. L’ATV si sgancerà dall’ISS e si tufferà nell’alta atmosfera, andando incontro a una morte incandescente. Ma questa missione non è una tantum. Il design e l’architettura delle operazioni sperimentati durante la missione Jules Verne saranno utilizzati per costruire e pilotare almeno altre quattro navi spaziali ATV. I prossimi ATV saranno lanciati approssimativamente una volta l’anno, rifornendo l’ISS e assicurando supporto vitale al programma della Stazione Spaziale Internazionale nel prossimo decennio.
Il viaggio spaziale dell’ATV verso l’ISS sarà caratterizzato da una serie di fermate intermedie – punti in cui l’ATV si ferma e i controllori di terra verificano che tutto proceda per il verso giusto prima di continuare. Questo modo di fare potrebbe essere paragonato a quello di un portalettere che consegna la posta. Il portalettere non sa se c’è un cane feroce che è legato alla catena o che lo attaccherà: raggiunge la fine della strada (si ferma e controlla che tutto sia a posto), arriva al cancello (si ferma e controlla ancora); apre la cassetta postale e recapita la lettera. Se in un punto qualsiasi di questo percorso appare il cane (o comincia a piovere o il portalettere fa cadere la borsa o si accorge che l’indirizzo è sbagliato) se le dà a gambe!
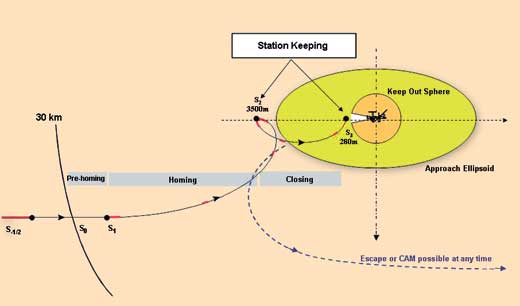
Le fermate intermedie sono numerate da S-5, che segna l’inizio delle operazioni di avvicinamento all’ISS (l’ATV si trova allora a circa 100 km dall’ISS) a S41, che dista soltanto 12 metri dall’attracco.
Quando l’ATV raggiungerà il punto S-1/2 (circa 40 km dietro e 5 km sotto l’ISS), saranno attivati i ricevitori del sistema di posizionamento globale dell’ATV e dell’ISS per calcolare le loro reciproche posizioni. L’ATV passerà poi per S0 (a 30 km dall’ISS) e si fermerà a S2, situato a 3,5 km dietro e a 100 metri sopra l’ISS.
Al termine dei controlli previsti al punto S2, si darà inizio a un movimento “di fuga”, per dimostrare il corretto funzionamento di questa manovra di sicurezza, dopo la quale l’ATV girerà intorno all’ISS per ritornare al punto S-1/2. Due giorni dopo avrà inizio una seconda fase dimostrativa. Questa volta l’ATV si avvicinerà al punto S3, situato 280 metri dietro l’ISS.
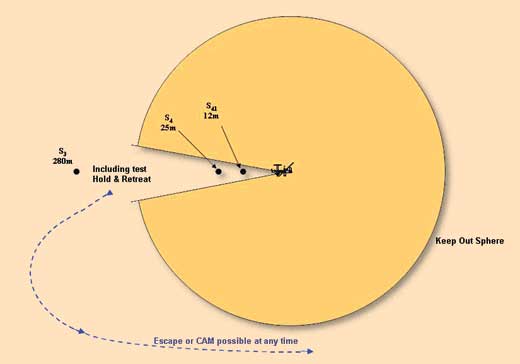
Successive verifiche saranno effettuate al punto S3 e l’ATV inizierà a utilizzare un sistema visivo per controllare il suo avvicinamento finale. Prima di tentare l’attracco, saranno testati una serie di comandi di arresto e ritirata, per verificare che l’equipe dei controllori di terra riesca, se necessario, a interrompere un tentativo di attracco riuscito male. Dopo essere ritornato con successo a S3, l’ATV procederà verso S4, situato a 25 metri dall’ISS, e poi a S41, che è ad appena 12 metri di distanza. Di nuovo, sarà impartito l’ordine di ritorno a S4 e infine quello di manovra “di fuga”, la prova d’interruzione definitiva, che lascerà girare nuovamente l’ATV intorno alla stazione e ritornare a S-1/2.
Da ultimo sarà impartito l’ordine di avvicinamento finale e l’ATV si aggancerà all’ISS.
Il sistema d’attracco dell’ATV è di fabbricazione russa, utilizzato su veicoli russi e progettato per essere compatibile col porto di attracco del modulo russo dell’ISS.
Quando l’ATV si avvicina all’ISS, viene estesa una sonda di fronte al veicolo. La punta della sonda è dotata di sensori che segnalano il contatto con il porto di attracco dell’ISS.
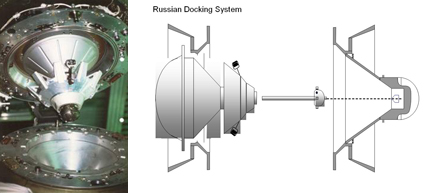
Quando il contatto è stabilito, l’ATV inizia una propulsione che spinge il veicolo verso il porto di attracco. Nel momento in cui la sonda raggiunge la fine del condotto conico del porto, il veicolo frena e l’estremità della sonda s’incastra nel porto di attracco.
La sonda viene quindi ritirata, portando così l’ATV ad unirsi all’ISS, dopodiché alcuni ganci dell’ATV si fissano automaticamente all’ISS. Da ultimo, i ganci dell’ISS si fissano a loro volta all’ATV e i due corpi diventano un’unica struttura rigida.
L’articolo riguarda prevalentemente il veicolo automatico (spaziale) di trasporto (ATV), progettato per agganciarsi automaticamente alla Stazione Spaziale Internazionale (SSI). Anche se ci sono vari aspetti del viaggio dell’ATV, dal momento del lancio a quello dell’attracco, che sono compatibili con i programmi di fisica (meccanica) pre-universitaria, l’argomento di maggiore interesse – per gli insegnanti di tecnica – potrebbe essere dato dai sistemi di rilevazione e controllo.
D’altra parte, l’ISS presenta numerosi elementi di interesse anche per gli insegnanti di fisica pre-universitaria – e in un prossimo numero è previsto un altro articolo sulla Stazione Spaziale Internazionale.
Comunque, molti insegnanti di materie scientifiche (e tecniche) apprezzeranno quest’articolo e anche alcuni allievi lo troveranno molto interessante. Di seguito segnalo alcune proposte di possibile utilizzo del pezzo.
“Le conseguenze della microgravità sulla fisica dei fluidi, sulla combustione e sul comportamento degli aerosol” – è un argomento che potrebbe dar luogo a una discussione di gruppo sul tipo di effetto che potrebbe verificarsi (per esempio, nei casi di convezione, quando brucia una candela o si diffonde un gas).
“Raggi e polvere cosmica, anti materia e materia oscura nell’universo” – gli studenti potrebbero fare ricerche in biblioteca o in Rete sulla natura (e l’importanza) di questi argomenti, che potrebbero forse sfociare in presentazioni in classe.
L’aspetto del rilevamento e controllo sarebbe adatto a curricoli tecnologici più che scientifici – e ce n’è abbastanza per un’intera lezione basata su varie attività e approcci.
Eric Deeson, Regno Unito
Download this article as a PDF