Supporting materials
Download
Download this article as a PDF





D’où les astronautes tirent-ils leur nourriture? Qu’advient-il de leurs déchets? Adam Williams de l’Agence Européenne de l’Espace à Darmstadt, Allemagne, décrit le développement d’une navette inhabitée destinée à desservir la Station Spatiale Internationale.

Imaginez un bus à impériale allant de la banlieue de Londres au Stade de Wembley. Nous suivons son trajet depuis la sortie de Windsor (résidence de la Reine), à 30km de Wembley, et le regardons se diriger lentement vers le centre de Londres. Lorsqu’il atteint Hanger Lane, à environ 3.5km de sa destination, il s’arrête quelques minutes, avant de continuer le long du Périphérique Nord et en remontant Harrow Road, être en vue du stade, à peu près 250 mètres plus loin. Finalement, il passe près d’une demie heure à se frayer un chemin vers une place de parking. Une fois qu’il est à la bonne place, nous regardons à l’intérieur – et réalisons qu’il n’y a pas de conducteur.
Situez maintenant ce voyage à 350km dans l’espace, et substituez à un Stade de Wembley fixe la Station Spatiale Internationale (ISS), qui couvre approximativement la même surface que le terrain de football mais se déplace à plus de 27 000km/heure. Le véhicule de la taille d’un bus approchant l’ISS est le Véhicule de Transfert Automatique (ATV), conçu par l’Agence Spatiale Européenne (ESA) pour voler vers l’ISS et s’y arrimer automatiquement. Lors de l’approche finale, il plane avec une vitesse relative de moins de 0.25km/heure, et avec une position mesurée avec une précision inférieure à 10 cm.
L’ISS est un projet multinational pour la construction et la pérennisation d’un laboratoire permettant la réalisation d’expériences en état de microgravité. La gravité à bord de l’ISS n’est pas complètement nulle, du fait des forces très faibles générées par des causes telles que la masse de l’ISS elle-même et la réaction au frottement de l’atmosphère. Les expériences ont essentiellement concerné les effets à long terme de la microgravité sur le corps humain. Les scientifiques projettent également d’utiliser l’ISS pour étudier les effets de la microgravité sur la physique des fluides, la combustion et le comportement des aérosols, de l’ozone, de la vapeur d’eau et des oxydes dans l’atmosphère terrestre, ainsi que les rayons cosmiques, la poussière cosmique, l’antimatière et les trous noirs dans l’Univers.

La présente recherche a pour objectifs à long terme le développement de la technologie nécessaire pour l’exploration et la colonisation par l’homme de l’espace et de systèmes planétaires (y compris en ce qui concerne des systèmes de survie, des mesures de sécurité et un contrôle de données environnementales de l’espace, par exemple), de nouveaux traitements des maladies, des méthodes plus efficaces de production de matériaux, des mesures plus précises impossibles à réaliser sur Terre, et une compréhension plus complète de l’Univers.
L’ISS aura un équipage permanent de six astronautes (jusqu’en Avril 2009, il n’y aura que trois membres d’équipage en permanence à bord). L’équipage et les fournitures sont transportés vers l’ISS et en sont ramenés en utilisant soit la Navette Spatiale de la NASA, soit le véhicule Soyouz de l’Agence Spatiale Russe. Les fournitures peuvent également être transférées en utilisant le véhicule automatique russe Progress. L’ATV – l’engin spatial le plus complexe jamais construit, lancé et géré par l’Agence Spatiale Européenne – complètera ces véhicules, et aidera à payer la quote-part de l’ESA sur les coûts de fonctionnement de l’ISS.
Plusieurs ATV sont programmés. Le premier, nommé Jules Verne d’après le fameux écrivain de science-fiction, sera lancé par une fusée Ariane 5 depuis la Guyane françaisew1. Alors que le présent article était en préparation, le lancement était prévu pour le 9 Mars 2008 et il était programmé que l’ATV s’arrimerait à l’ISS le 3 Avril 2008w2.
Les navettes qui s’arriment à l’ISS disposent normalement d’un certain contrôle manuel pour les manœuvres d’arrimage finales. La Navette Spatiale et Soyouz sont contrôlés par un pilote à bord; Progress est contrôlée par l’équipage de l’ ISS. L’ATV sera la première navette à s’arrimer de manière complètement automatique. Bien que l’ATV doive être contrôlé de près durant son approche et son arrimage par des contrôleurs au sol et l’équipage de l’ISS, il est conçu pour gérer de manière autonome toute situation d’urgence sans endommager ni lui ni l’ISS, ni mettre en danger l’équipage de l’ISS.

L’ATV est conçu pour transporter plus de neuf tonnes d’expériences, équipements, carburants, eau, nourriture et autres fournitures de la Terre à l’ISS en orbite à 350km au dessus de celle-ci. Le premier chargement inclura des pièces détachées pour le laboratoirew3 européen Columbus et l’ATV, des objets personnels pour l’équipage, et une édition de luxe du 19ème siècle du livre De la Terre à la Lune écrit par Jules Verne.
Une fois lié à l’ISS, l’ATV deviendra une extension de 22 m3 de celle-ci, fournissant un espace de vie supplémentaire à son équipage. Pendant la jonction, l’ensemble des expériences sera transféré à l’ISS, ainsi que plus de 810 kg d’eau, 100 kg d’azote, oxygène et air et près de 860 kg de combustible pour l’ ISS . L’ATV utilisera également ses propulseurs pour corriger et ajuster l’orbite des 400 tonnes de l’ISS. Cela est nécessaire, car même s’il n’existe qu’une atmosphère très raréfiée à une altitude de 350km, l’ISS est si grosse qu’elle crée une résistance. Il faut de temps en temps la propulser à une altitude supérieure, d’où elle descend de plus en plus bas. Sans cela, l’ISS finirait par tomber du ciel. L’ATV sera également utilisé pour des manoeuvres d’urgence, telles que celles requises si l’on prévoit que des débris de l’espace doivent atteindre l’ISS.
Après environ six mois, l’ATV sera chargé des déchets solides et liquides de la station (Imaginez un peu! Ces réservoirs vides peuvent aussi bien stocker quelque chose). Il sera alors désarrimé de l’ISS, et renvoyé vers la Terre où il se consumera sans danger dans l’atmosphère au dessus d’une zone inhabitée de l’Océan Pacifique.

Du fait que l’ATV s’approchera de l’ISS pour s’y arrimer, la sécurité de l’équipage à bord de l’ISS est essentielle. La plupart des fonctions d’un engin spatial sont doublement redondantes, ce qui signifie que chaque sous-système, composant unitaire, commutateur et vanne est doublé pour que l’engin puisse survivre à toute défaillance simple. Lorsque des humains sont impliqués, les systèmes doivent être triplement redondants; l’ATV est donc conçu pour faire face à deux défaillances simultanées. Cela augmente évidemment le coût et le poids de l’engin, bien qu’il soit difficile de quantifier de combien.
Par exemple, l’ATV dispose d’un système de propulseurs principaux et redondants pour le guider lors de son arrimage à l’ISS. Dans le cas où les deux propulseurs principal et redondant seraient défaillants, il dispose d’un système de propulsion alternatif séparé, contrôlé par un équipement et un logiciel complètement différents.
Ce système sera en particulier utilisé s’il apparaît que l’ATV ne va pas s’arrimer correctement à l’ISS. Ceci pourrait être dû à une défaillance de système à l’intérieur de l’ATV ou à ce que sa vitesse n’est pas celle attendue, ou peut être rendu nécessaire par un problème propre à l’ISS (tel que alarme incendie). Les contrôleurs au sol du Centre de Contrôle de l’ATV à Toulouse, France, l’équipage de l’ISS ou l’ATV lui-même peuvent donner des instructions au système de propulsion pour qu’il éloigne la navette de l’ISS à distance de sécurité. Les contrôleurs évaluent alors la situation. Si elle est bien comprise et qu’on peut la corriger, ils commanderont à l’ATV de tourner au dessus de l’ISS et derrière elle et de revenir pour une seconde tentative. Si tel n’est pas le cas, l’ATV sera parqué à 2000 km de l’ISS pour des investigations plus approfondies.
Une bonne partie de la complexité de la mission Jules Verne vient de ce qu’il faut prouver que ces systèmes de sécurité fonctionnent correctement. Ce n’est que quand toutes les opérations vitales de sécurité auront fait la preuve qu’elles se déroulent parfaitement, que l’ATV sera autorisé à s’arrimer à l’ISS (voir encadré ‘Entraînement au lancement’).

Avant de pouvoir lancer l’ATV, les équipes de contrôle au sol au Centre de Contrôle de l’ATV à Toulouse, France, doivent réaliser une série de simulations pour leur entraînement en commun avec les équipes de contrôle de l’ISS de Houston, USA, et de Moscou, Russie, plus des représentants de l’équipage de l’ISS. Ce qui suit donne une idée de ce qu’ils subissent pendant une journée typique de simulation.
05.00 CET: A Toulouse, un opérateur démarre le simulateur, qui simule l’engin spatial ATV, l’ISS, le réseau US de communications par satellite TDRS, le satellite de communications de l’ESA Artemis et des parties du réseau de stations au sol de l’ESA et russes. Il est composé de trois parties, fonctionnant dans trois centres de contrôle. A Moscou et à Houston d’autres opérateurs préparent également leurs ordinateurs, prêts pour une session multinationale d’entraînement.
06.30: Les équipes arrivent pour le briefing. Le système intercom connectant les sites est vérifié.
06.52: Il y a des difficultés avec le simulateur à Toulouse, ce qui retarde le démarrage de la simulation. L’opérateur passe des minutes difficiles à localiser le problème. Si le simulateur ne peut démarrer proprement, il sera nécessaire de reconvoquer un grand nombre d’ingénieurs qui se sont rassemblés autour du monde pour participer.
08.05: Le bouton GO est pressé, et les simulateurs commencent à envoyer des données. L’arrimage interviendra dans environ sept heures; avant cela, la simulation couvre une approche vers l’ISS, culminant en une manoeuvre ‘Dégagement’ qui prouve que l’on peut stopper l’arrimage si nécessaire.
08:41: Les instructeurs de chaque centre de contrôle confèrent entre eux au sujet de l’impact d’un démarrage retardé. Houston ne peut participer que pendant huit heures, après quoi leurs installations sont mobilisées par un entraînement pour la Navette. Les instructeurs décident d’avancer l’un des événements programmés pour assurer la réalisation de l’entraînement nécessaire.
11.28: L’ATV démarre une série de petites poussées directionnelles. On signale un problème sur les données du centre de télécommunication de Oberpfaffenhofen, Allemagne. A l’insu des participants, on a introduit une défaillance dans le réseau de communication entre Oberpfaffenhofen et Toulouse. Il y a une rafale d’appels sur l’intercom, et les contrôleurs au sol maîtrisent rapidement le problème.
14.18: L’ATV est en approche de l’ISS, rassemblant les données d’étalonnage utilisées pour contrôler l’arrimage final. On entend soudain une voix pressante sur l’intercom: “Nous avons une urgence”. Toulouse a perdu tout contact avec l’engin spatial.
14.25: La défaillance trouve son origine dans le TDRS –et a été délibérément introduite par l’instructeur. Il estime pendant combien de temps il va laisser les équipes dans cette situation critique, puis met fin au problème. Toulouse doit commander à l’ATV de s’écarter de l’ISS et de répéter la manœuvre finale, en rassemblant à nouveau les données d’étalonnage vitales perdues lors de la panne du système de télécommunications.
15.29: La manoeuvre ‘dégagement’ programmée est commandée. L’ATV manoeuvre en s’éloignant doucement de l’ISS et la simulation est terminée. Les directeurs de vol et les instructeurs ont une discussion à quatre voix au sujet du système, identifiant les succès et échecs clé, et tout ce qui doit être amélioré ou changé.
En dépit d’un démarrage retardé, et d’une journée longue et difficile, les équipes sont clairement heureuses de ce qu’elles ont réalisé. Elles tournent en rond dans la salle de contrôle principale, tout en se félicitant d’avoir traité avec succès les problèmes rencontrés. Elles ont démontré leur savoir-faire en contrôlant l’engin spatial le plus complexe que l’ESA ait jamais construit, et, leur confiance grandissant, elles se rapprochent encore de la mission de l’ATV.
La mission démarrera par la phase de lancement et des opérations préalables (LEOP), l’engin spatial étant mis en orbite terrestre basse par un lanceur Ariane 5. Il s’agit probablement de la partie la plus risquée de la mission, en particulier jusqu’à ce que l’ATV ait déployé ses quatre ensembles de panneaux solaires utilisés pour générer l’énergie nécessaire au contrôle de l’engin. Bien que l’ATV dispose de batteries fournissant l’énergie jusqu’au déploiement des panneaux solaires, celles-ci finiront par s’épuiser; si les panneaux ne fonctionnent pas, l’engin spatial tombera et toute la mission sera un échec.
Après la LEOP, l’engin réalisera une série de manoeuvres qui le mettront en orbite en phase avec l’ISS, approchant celle-ci par derrière et légèrement en dessous. L’approche de l’ISS sera caractérisée par une série de virages et de pointages d’observation de la station (voir encadré ‘L’approche de l’ISS’). Environ 15 jours après le lancement, l’approche finale et le rendez-vous commenceront et l’ATV s’arrimera automatiquement à l’ISS (voir encadré ‘système d’arrimage russe’) après les vérifications effectuées lors de chaque pointage d’observation de la station. L’ATV est conçu pour faire face à un large éventail de problèmes simultanés sans qu’il en résulte de dommage pour lui-même ou l’ISS. Tout est autonome – les contrôleurs et l’équipage ne sont là que pour garder un œil sur le système au cas où quelque chose irait de travers.
Une fois arrimé, l’engin sera surveillé et contrôlé en utilisant les données envoyées via l’ISS au centre de contrôle de Toulouse; les logiciels embarqués sur l’ATV et gérés à Toulouse peuvent détecter des situations inattendues – depuis des ventilateurs de circulation d’air défaillants jusqu’à un incendie.
Malheureusement, toutes les bonnes choses doivent avoir une fin. L’ATV se désarrimera de l’ISS pour plonger vers une combustion mortelle en haute atmosphère. Mais il ne s’agit pas d’une mission sans lendemain. Le concept et l’étude opérationnelle mis à l’essai lors de la mission Jules Verne seront utilisés pour construire et faire orbiter au moins quatre engins spatiaux supplémentaires de type ATV. Ces ATV ultérieurs seront lancés approximativement une fois par an, réalimentant l’ISS et fournissant un support vital au programme ISS dans la décennie à venir.
Le voyage de l’ATV vers l’ISS sera ponctué d’une série de pointages d’observation de la station – en des endroits de l’espace où l’ATV fait une pause et où les contrôleurs au sol vérifient que tout va bien avant de continuer. On pourrait comparer ceci à la tournée d’un facteur. Le facteur ne sait pas si un chien méchant est attaché ou prêt à l’attaquer: il va au bout de la rue (fait une pause et vérifie que tout va bien); il se rend à la porte (refait une pause et une vérification); il se rend au pied des marches (et fait encore une pause); il ouvre la boîte aux lettres et dépose la lettre. Si le chien apparaît à un moment quelconque (ou s’il commence à pleuvoir, s’il laisse tomber son sac ou découvre que l’adresse est fausse), il s’enfuit!
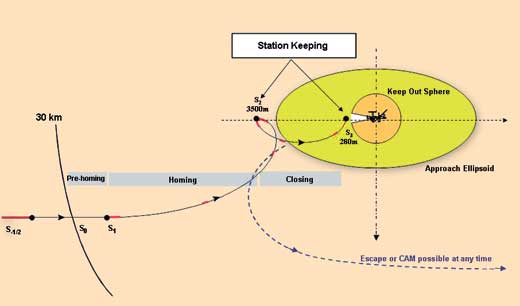
Les points de stationnement de l’ATV sont numérotés de S-5, qui marque le démarrage des opérations d’approche de l’ISS (l’ATV est alors à environ 100 km de l’ISS), à S41, qui ne se trouve qu’à 12 m du point d’arrimage.
Lorsque l’ATV atteint S-1/2 (environ 40km derrière et 5km en dessous de l’ISS), les récepteurs du système GPS à bord de l’ATV et de l’ISS sont utilisés pour calculer leurs positions relatives. L’ATV passera alors en S0 (à 30km de l’ISS) et s’arrêtera au point d’observation S2, situé 3.5km derrière et 100 m au dessus de l’ISS.
Lorsque tous les contrôles auront été complétés en S2, une manoeuvre de ‘dégagement’ sera lancée pour démontrer que la manœuvre de sécurité fonctionne correctement, après quoi l’ATV tournera autour de l’ISS pour retourner en S-1/2. Deux jours plus tard, une seconde phase de démonstration sera lancée. Cette fois-ci, l’ATV s’approchera du point S3, 280 m derrière l’ISS.
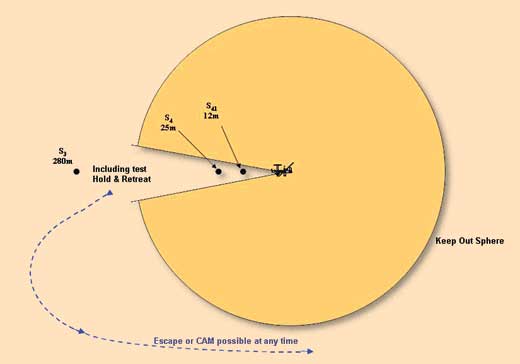
Des contrôles supplémentaires seront réalisés en S3, et l’ATV basculera en système visuel pour le contrôle de l’approche finale. Avant de pouvoir tenter l’arrimage, on réalise une série de commandes maintien en position – retrait, pour s’assurer que l’équipage ou les contrôleurs au sol peuvent arrêter une tentative d’arrimage infructueuse si nécessaire. Après s’être retiré avec succès en S3, l’ATV continuera vers S4, qui se trouve à 25 m de l’ISS, puis vers S41, à seulement 12 m. On réalisera un autre retrait vers S4, et finalement une manœuvre ‘dégagement’, l’ultime test de mission avortée, qui amènera l’ATV à tourner à nouveau autour de la station avant de revenir en S-1/2.
Further checks will be performed at S3, and ATV will switch to using a visual system to control its final approach. Before docking can be attempted, a series of hold and retreat commands will be demonstrated, to ensure that the crew or ground controllers can stop an unsuccessful docking attempt if necessary. Having successfully retreated to S3, ATV will continue to S4, which is 25 m from the ISS, and then to S41, a mere 12 m away. Again, a retreat to S4 will be commanded, and finally an ‘Escape’ manoeuvre, the ultimate abort test, which will leave ATV again circling the station and returning to S-1/2.
On commandera enfin l’approche finale, et l’ATV s’arrimera à l’ISS.
Le système d’arrimage de l’ATV est un système, également utilisé sur des véhicules russes, et conçu pour être utilisé avec l’orifice d’arrimage sur le module russe de l’ISS.
Lorsque l’ATV est en approche de l’ISS, une sonde située sur le devant du véhicule est déployée. L’extrémité de la sonde dispose de capteurs qui détectent le contact avec l’orifice d’arrimage sur l’ISS.
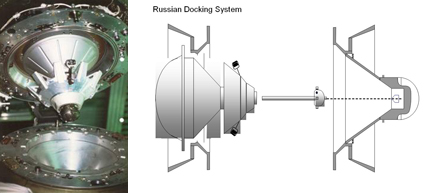
Lorsqu’un contact est détecté, l’ATV génère une poussée qui applique le véhicule dans l’orifice d’arrimage. Lorsque la sonde atteint l’extrémité du cône de l’orifice d’arrimage, le véhicule freine et des cliquets sur la sonde s’engagent dans l’orifice d’arrimage.
La sonde est alors rétractée, ce qui met en contact l’ATV et l’ISS, après quoi des crochets de l’ATV s’engagent automatiquement dans l’ISS. Enfin, des crochets de l’ISS s’engagent dans l’ATV, et les deux parties deviennent une structure rigide unique.
L’article traite principalement du Véhicule (spatial)de Transfert Automatique (ATV), conçu pour s’arrimer automatiquement à la Station Spatiale Internationale (ISS). Bien qu’il y ait des aspects de la trajectoire de l’ ATV entre son lancement et son arrimage liés à de la physique du niveau du secondaire (mécanique), le sujet le plus intéressant – pour des professeurs de technologie – peut être celui des systèmes de capteurs et de contrôle.
La mission de l’ISS, par ailleurs, inclut nombre d’aspects intéressants pour des professeurs de sciences physiques du secondaire – et un article suivant dédié à l’ISS est programmé pour un numéro à venir.
Quoi qu’il en soit, de nombreux professeurs de sciences physiques (et de technologie) apprécieront le présent article et certains débutants le trouveront également très intéressant. Ci-dessous quelques idées sur la manière d’une possible utilisation.
‘L’effet de la microgravité sur la physique des fluides, sur la combustion, sur le comportement des aérosols’ – ceci pourrait conduire à une discussion de groupe sur ce que pourrait être cet effet (par exemple, dans le cas de la convection, une chandelle en train de se consumer, et la diffusion dans un gaz, respectivement).
‘Rayons cosmiques, poussière cosmique, antimatière et trous noirs dans l’Univers’ – les élèves pourraient faire une bibliographie ou une recherche sur le Web sur la nature (et l’importance) de ces thèmes, amenant peut-être à des présentations en classe.
L’aspect capteurs et contrôle serait adapté aux filières technologiques plutôt que scientifiques – et il y assez de contenu pour une leçon complète d’activités et d’approches variées.
Eric Deeson, Royaume Uni
Download this article as a PDF