Supporting materials
Download
Download this article as a PDF





Tłumaczenie Grzegorz Glubowski. Skąd astronauci otrzymują jedzenie? Co robią z odpadkami? Adam Williams z Europejskiej Agencji Kosmicznej w Darmstadt, Niemcy, opisuje powstawanie bezzałogowego promu zaopatrującego międzynarodową stację kosmiczną.

Wyobraź sobie piętrowy autobus jadący z peryferii Londynu do stadionu Wembley. Zauważamy go nieopodal Winsoru (tam mieszka królowa), 30 km od Wembley i obserwujemy jak powoli zmierza do centrum Londynu. Przy Hanger Lane, około 3.5 km od celu, zatrzymuje się na kilka minut przed wjazdem na North Circular Road i później na Harrow Road, aż będzie widać stadion, około 0.25 km od niego. W końcu niemal połowę godziny wlecze się do miejsca postojowego. Gdy już zaparkuje, zaglądamy do jego wnętrza – i dopiero teraz dostrzegamy brak kierowcy.
Przenieśmy się teraz 350 km w górę, a stadion na Wembley zastąpmy Międzynarodową Stację Kosmiczną (International Space Station – ISS). Powierzchnią odpowiada ona boisku piłkarskiemu, ale porusza się z szybkością ponad 27 000 km/godz. Pojazd wielkości autobusu, zbliżający się do ISS, to Zautomatyzowany Statek Transportowy (Automated Transfer Vehicle – ATV) Europejskiej Agencji Kosmicznej (ESA), podróżujący i automatycznie dokujący do ISS. Kończy swoje podejście ze względną szybkością mniejszą niż 0.25 km/godz. i dokładnością pozycyjną lepszą niż 10 cm.
ISS jest wielonarodowym przedsięwzięciem, którego celem jest zbudowanie i utrzymanie laboratorium dla eksperymentów przy w minimalnej grawitacji. Grawitacja nie jest na ISS dokładnie zerowa, ponieważ bardzo małe siły wywołane są np.: masą ISS i reakcją na tarcie z atmosferą. Owe eksperymenty dotyczyłyby głównie efektów długotrwałego wpływu mikrograwitacji na organizm ludzki. Planowane jest też wykorzystanie ISS do badania wpływu mikrograwitacji na ciecze, na spalanie, na działanie aerozoli, na ozon, parę wodną i tlenki w Ziemskiej atmosferze. Również badanie promieniowania kosmicznego, pyłu kosmicznego, ciemnej materii i antymaterii we Wszechświecie.

Celami długofalowymi tych badań ma być rozwinięcie technologii niezbędnej do eksploracji planetarnej i kosmicznej oraz kolonizacji (np.: systemy podtrzymywania życia, środki bezpieczeństwa, monitorowanie środowiska w przestrzeni), nowe metody walki z chorobami, efektywniejsze metody produkcji materiałów, dokładniejsze pomiary niż to możliwe na Ziemi i pełniejsze rozumienie Wszechświata.
ISS będzie miał załogę sześciu astronautów (do kwietnia 2009 tylko trzech członków załogi będzie na pokładzie na stałe). Załoga oraz zaopatrzenie są dostarczane do i z ISS albo przy użyciu promów kosmicznych, albo rakiety Sojuz – Rosyjskiej Agencji Kosmicznej. Zaopatrzenie może też dostarczać bezzałogowy rosyjski Progress. ATV – najbardziej skomplikowany statek kosmiczny jaki kiedykolwiek zbudowano, wystrzelony i sterowany przez Europejską Agencję Kosmiczną –uzupełni te pojazdy i ułatwi spłatę udziału ESA w kosztach funkcjonowania ISS.
Planowanych jest kilka ATV. Pierwszy, o nazwie Jules Verne na cześć słynnegofrancuskiego pisarza science fiction, będzie wystrzelony na Ariane 5 z Guyany Francuskiejw1. Kiedy przygotowywano ten artykuł, planowany był start na 9 marca 2008 i dokowanie ATV przy ISS na 3 kwietnia 2008w2.
Pojazdy, które cumują do ISS podlegają ręcznej kontroli podczas manewru końcowego. Prom kosmiczny czy Sojuz są kontrolowane przez pilota na pokładzie. Progress jest sterowany przez członków załogi ISS. ATV będzie dokwał całkowicie automatycznie. Chociaż podchodzenie i dokowanie będzie monitorowane przez kontrolerów naziemnych i załogę ISS, to jest on zaprojektowany do radzenia sobie samodzielnie w każdej sytuacji awaryjnej, bez uszczerbku dla siebie lub ISS, czy też zagrożenia dla załogi ISS.

ATV przewozi ponad dziewięć ton sprzętu, paliwa, wody, żywności i innych zapasów z Ziemi do ISS orbitującego około 350 km ponad jej powierzchnią. Pierwszy lot towarowy będzie zawierał części zamienne dla laboratorium European Columbusw3 i samej ATV, artykuły osobiste dla załogi i luksusowe 19-to wieczne wydanie książki Julesa Verne De la Terre à la Lune (From the Earth to the Moon).
Przyłączony do ISS, ATV przekształci się w dodatkowe pomieszczenie mieszkalne (22 m3) dla załogi. Po złączeniu, zostanie przeniesiony do ISS sprzęt naukowy oraz ponad 810 kg wody, 100 kg azotu, tlenu i powietrza, a także niemal 860 kg paliwa. ATV będzie korzystał ze swoich silników dla korekcji orbity 400 tonowego ISS. Jest to konieczne pomimo bardzo rzadkiej atmosfery na wysokości 350 km, gdyż ISS jest na tyle duży, że podlega pewnemu przyciąganiu. Za każdym razem należy wznieść go na wyższą orbitę, z której powoli opada niżej i niżej. W przeciwnym razie stacja mogłaby w końcu spaść. ATV będzie także wykorzystywany przy manewrach bezpieczeństwa, wymaganych jeśli jakieś szczątki kosmiczne miałyby uderzyć w ISS.
Po około sześciu miesiącach, ATV zostanie załadowany stałymi i ciekłymi odpadkami ze stacji (Wyobraź sobie! Te puste pojemniki także mogą coś przechowywać). Wtedy też zostanie odłączony od ISS i odleci w kierunku Ziemi, gdzie spłonie bezpiecznie w atmosferze, powyżej niezamieszkałych obszarów Pacyfiku.

Ponieważ ATV podejdzie i zostanie połączony z ISS, najważniejsze staje się bezpieczeństwo jej załogi. Większość funkcji statku jest podwojona, co oznacza, że każdy podsystem, układ, wyłącznik czy zawór jest zduplikowany, aby statek mógł przetrwać dowolną jednostkową awarię. Gdy zagrożeni są ludzie, systemy muszą być potrojone; ATV jest z tego powodu zaprojektowany do radzenia sobie z dwiema równoczesnymi awariami. To oczywiście zwiększa koszty oraz masę pojazdu, trudno jednak określić o ile.
Na przykład, ATV ma system napędowy z głównym i pomocniczymi silnikami do dokowania przy ISS. Na wypadek przerwy w działaniu jednocześnie silnika głównego i pomocniczych, posiada alternatywny zespół silników, nadzorowany przez niezależne urządzenia i programy. Ten system może być użyty, gdy okaże się, że dokowanie przebiega niewłaściwie. Mogłoby się to być z powodu uszkodzenia systemów wewnątrz ATV lub gdy jego szybkość nie jest taka jak oczekiwana, lub też jeśli wystąpi niezależny problem na ISS (na przykład alarm pożarowy). Kontrolerzy naziemni w Centrum Kontroli ATV w Tuluzie, Francja, załoga ISS lub też ATV samodzielnie mogą sterować układem silników by skierować pojazd na odległość bezpieczną dla ISS. Kontrolerzy następnie ocenią sytuację. Jeśli będzie możliwe dokonanie korekt, mogą spowodować, że ATV okrąży ISS i ponowi próbę. Jeśli przyczyny okażą się niejasne, ATV ustawi się w odległości 2000 km od ISS i zostaną podjęte dalsze dochodzenia.
Złożoność misji Jules Verne wynika głównie z konieczności prawidłowego działania systemów bezpieczeństwa. Gdy wszystkie procedury bezpieczeństwa zadziałają bezbłędnie, ATV będzie mógł dokować przy ISS (zobacz „Przygotowania do startu).

05.00 czasu środkowoeuropejskiego: Pracownik w Tuluzie włącza symulatory statków ATV i ISS, amerykańską satelitarną sieć komunikacyjną TDRS, satelitę komunikacyjnego Artemis (ESA) i część należących do ESA oraz Rosji sieci stacji naziemnych. Jej trzy części, nadzorowane są w trzech centrach kontroli. W Moskwie i Houston inni operatorzy przygotowują swoje komputery do międzynarodowej sesji treningowej.
06.30: Zespoły przybywają na odprawę. Sprawdzana jest łączność między ośrodkami.
06.52: Pojawiają się trudności z symulatorem w Tuluzie, które opóźniają rozpoczęcie symulacji. Operator ma urwanie głowy rozsupłując problem. Jeśli symulator nie zadziała właściwie, trzeba będzie ponownie zwoływać zespoły inżynierskie, które zgromadziły się w różnych miejscach globu.
08.05: Przycisk START zostaje wciśnięty, symulatory zaczynają wysyłanie danych. Dokowanie odbędzie się za około siedem godzin. Do tego czasu symulacja dotyczy podejścia do ISS zakończonego manewrem „Ucieczka”, pozwalającym wstrzymać dokowanie gdy zajdzie potrzeba.
08:41: Instruktorzy w każdym centrum kontrolnym konferują prywatnie nad skutkami opóźnionego startu. Houston po ośmiu godzinach potrzebuje swoich urządzeń są do symulacji lotu promu. Instruktorzy wybierają jeden z planowanych wariantów treningu.
11.28: ATV rozpoczyna serię zwrotów samonaprowadzających. Dane z centrum komunikacyjnego w Oberpfaffenhofen, Niemcy, ujawniają jakiś nowy dla instruktorów problem – brak komunikacji między Oberpfaffenhofen i Tuluzą. Po burzy połączeń za pośrednictwem intercomu kontrolerzy naziemni szybko sobie z nim radzą.
14.18: ATV podchodzi do ISS, gromadząc dane kalibracyjne dla sensorów optycznych wykorzystywanych do kontroli dokowania. Nagle rozlega się natarczywy głos z interkomu: „Niebezpieczeństwo”. Tuluza utraciła kontakt ze statkiem.
14.25: Przyczyną awarii okazuje się problem z TDRS – umyślnie spowodowany przez instruktora. To on decyduje na jak długo pozostawić zespoły w tej krytycznej sytuacji, po czym usuwa usterkę. Teraz Tuluza musi polecić oddalenie się ATV od ISS i powtórzenie manewru zbliżania, by ponownie zgromadzić dane kalibracyjne utracone podczas przerwy w komunikacji.
15.29: Zarządzony zostaje zaplanowany manewr “Ucieczka”. ATV bezpiecznie oddala się od ISS, co oznacza zakończenie symulacji. Kierownicy lotu oraz instruktorzy szkoleniowi odbywają czterostronną dyskusję poprzez interkom, określając sukcesy i porażki oraz wszystko co wymaga poprawy lub zmiany.
Pomimo opóźnienia startu i wytężonej pracy, zespół jest zadowolony z wyniku. Krążą wokół głównego pomieszczenia kontrolnego, gratulując sobie wzajemnie pomyślnego rozwiązania problemów, przed którymi stanęli. Zademonstrowali swoją umiejętność kontrolowania najbardziej skomplikowanego statku kosmicznego jaki ESA kiedykolwiek zbudowała. Ich pewność siebie rośnie, zbliżają się krok bliżej misji ATV.
Misję zainicjuje start oraz początkowa faza lotu (LEOP), w której statek zostanie wyprowadzony na niską orbitę przez rakietę nośną Ariane 5. To najbardziej ryzykowna prawdopodobnie część misji, szczególnie zanim ATV rozłoży swoje cztery baterie słoneczne, potrzebne do wytworzenia energii niezbędnej dla kontrolowania statku. Własne akumulatory, dostarczające energii zanim zadziałają baterie słoneczne, mogłyby się wyczerpać, a w konsekwencji statek zamrzeć i cała misja byłaby stracona.
Po LEOP, statek będzie wykonywał szereg manewrów by skorelować swoją orbitę z orbitą ISS, podchodząc do niego z tyłu i nieco z dołu.
Podejście do ISS będzie nacechowane szeregiem punktów kontrolnych (zobacz „Podchodzenie do ISS”). Około 15 dni po starcie, rozpocznie się finalna część podchodzenia i ATV automatycznie zadokuje przy ISS (zobacz „Rosyjski system dokowania”) podlegając kontroli w każdym kolejnym punkcie. ATV może poradzić sobie z wieloma problemami na raz, nie dopuszczając do uszkodzenia samego siebie ani też ISS. Wszystko jest autonomiczne – zespół kontrolujący i załoga obserwują przebieg zdarzeń na wypadek gdyby coś poszło nie tak.
Po złączeniu statek będzie monitorowany; dane wysyłane za pośrednictwem ISS do centrum kontroli w Tuluzie. Oprogramowanie na ATT i w Tuluzie może wykryć nieoczekiwane sytuacje – od uszkodzenia wentylatora do pożaru.
Niestety, dobre musi się skończyć. ATV odłączy się od ISS i zanurkuje ku swojej płomienistej śmierci w górnych warstwach atmosfery. Jednak nie jest to jednorazowa misja. Projekt i koncepcja działania sprawdzone podczas misji Jules Verne zostaną wykorzystane przy budowie co najmniej czterech kolejnych statków ATV. Kolejne ATV będą wystrzeliwane mniej więcej raz do roku, zaopatrując ISS i zasadniczo wspierając program ISS w ciągu następnej dekady.
Droga ATV do ISS będzie nakreślona serią punktów kontrolnych – miejsc, w których ATV zatrzymuje się, podczas gdy naziemni kontrolerzy sprawdzają czy wszystko jest OK przed dalszą podróżą. Podobnie przebiega dostarczania poczty przez listonosza. Nie wie on, czy groźny pies jest zamknięty i czy go nie zaatakuje. Dochodzi do miejsca wskazanego przez adres (zatrzymuje się i sprawdza czy wszystko jest OK); podchodzi do bramy (zatrzymuje się i sprawdza ponownie); podchodzi do drzwi wejściowych (zatrzymuje się ponownie); otwiera skrzynkę pocztową i wkłada list. Jeśli w którymkolwiek punkcie pojawi się pies (lub zaczyna padać; rzuca torbę pocztową lub sądzi, że adres jest niewłaściwy), salwuje się ucieczką!
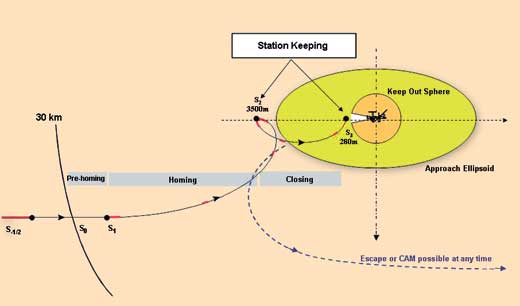
Punkty kontrolne stacji są numerowane od S-5, miejsca początku operacji zbliżania do ISS (ATV jest wtedy około 100 km od ISS), do S41, który jest zaledwie 12 m od miejsca dokowania.
Gdy ATV osiąga S-1/2 (około 40 km za i 5 km poniżej ISS) odbiorniki GPS na ATV i ISS pomagają wyznaczyć ich względną pozycję. ATV minie następnie S0 (30 km od ISS) i zatrzyma się w punkcie S2, ulokowanym 3.5 km za i 100 m powyżej ISS.
Gdy wszystkie procedury w S2 zostaną zakończone, zainicjowany będzie manewr „Ucieczka” dla sprawdzenia poprawności tej operacji bezpieczeństwa, podczas której ATV ma okrążyć ISS i powrócić do punktu S-1/2. Dwa dni później przeprowadzona będzie druga faza demonstracyjna. W tym czasie, ATV podejdzie do S3, 280 m za ISS.
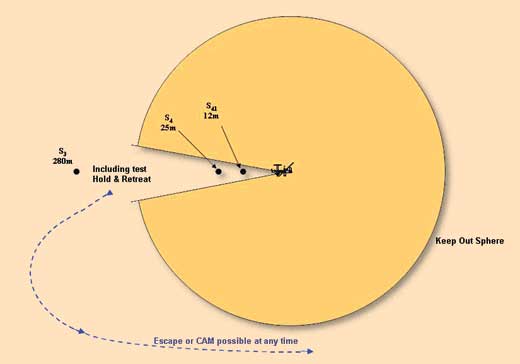
Dalsze czynności będą przeprowadzone w S3, gdzie ATV włączy wizualną kontrolę końcowego etapu podchodzenia. Zanim będzie można dokować, trzeba wykonać serię komend wstrzymania i wycofania, by upewnić się, że kontrolerzy naziemni są w stanie powstrzymać niepomyślną próbę dokowania, o ile pojawi się taka potrzeba.
Powróciwszy pomyślnie do S3, ATV podąży do S4, 25 m od ISS, a potem do S41, zaledwie 12 m od niego. Zostanie ponownie polecony powrót do S4 i ostateczny test przerwania – manewr „Ucieczka”, który spowoduje ponowne okrążenie stacji przez ATV i jego powrót do S-1/2.
Na koniec zakomenderowane zostanie dokończenie podejścia i ATV zadokuje przy ISS.
System dokowania ATV jest systemem rosyjskim, używanym przez statki rosyjskie i przeznaczonym dla portu dokowania na rosyjskim module ISS.
Gdy ATV podchodzi do ISS, wysuwany jest próbnik na przedzie pojazdu. Czub próbnika posiada sensory wykrywające kontakt z portem dokowania na ISS.
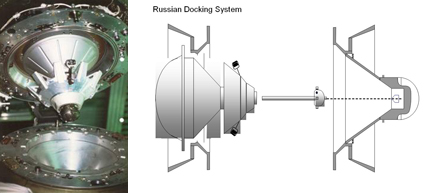
Gdy wykryty jest kontakt, ATV włącza ciąg, który popycha pojazd w kierunku portu dokowania. Gdy próbnik osiąga koniec stożka portu dokowania, pojazd hamuje i zakleszcza próbnik w porcie dokowania.
Próbnik jest później chowany i następuje ścisłe połączenie ATV z ISS, po czym haki z ATV automatycznie zazębiają się z ISS. Na koniec haki z ISS zazębiają się z ATV i oba obiekty stają się jedną sztywną konstrukcją.
Artykuł przedstawia zautomatyzowany pojazd kosmiczny (ATV), zdolny dokować automatycznie przy Międzynarodowej Stacji Kosmicznej (ISS). Choć zagadnienie trajektorii ATV od startu do dokowania odnosi się do mechaniki (fizyki przed-uniwersyteckiej), najbardziej interesujące – dla nauczycieli techniki – może być zbieranie danych i systemy kontroli.
Liczne aspekty funkcjonowania ISS są interesujące dla nauczycieli przed-uniwersyteckiej fizyki – dlatego kolejny artykuł poświęcony ISS jest planowany w przyszłym wydaniu.
Artykuł ten przypadnie do gustu wielu nauczycielom nauk przyrodniczych (i technicznych), podobnie potraktują go niektórzy uczniowie. Poniżej prezentujemy kilka pomysłów jego wykorzystania.
‘Znaczenie mikrograwitacji dla fizyki cieczy, spalania, działania aerozoli” – mogłoby prowadzić do grupowej dyskusji o możliwym rezultacie (np. w przypadku konwekcji, płomienia świecy, dyfuzji w gazie).
“Promienie kosmiczne, pył kosmiczny, antymateria i ciemna materia we Wszechświecie” – uczniowie mogą szukać w bibliotece lub Internecie informacji na temat ich natury (i znaczenia), prezentując prawdopodobnie wyniki w klasie.
Odczytywanie danych i kontrola byłby odpowiednie dla techniki bardziej niż dla przedmiotów przyrodniczych. Jest tu wiele materiału na barwną lekcję.
Eric Deeson, Wielka Brytania
Download this article as a PDF