Explore the properties of sound waves by using robotics Teach article
Author(s): Vasileios Ladas, Georgios Stylos, Konstantinos T. Kotsis
Sounds good: try some simple activities that use robots to explore the basic properties of sound waves – reflection, absorption, and propagation.
Science, technology, engineering, and mathematics (STEM) education plays a crucial role in preparing students for the challenges of an increasingly technological world.[1,2] By engaging students with interactive tools and real-world applications, STEM fosters a deeper understanding of key scientific and engineering concepts. Robotics, in particular, has emerged as a powerful educational resource, providing opportunities for students to explore complex topics in a dynamic and engaged manner.[3,4] As students work through challenges, they develop the ability to analyze problems, test solutions, and refine their thinking – skills essential for success in academic and real-world settings.[3–6]
Sound is defined as a mechanical wave, which propagates through the vibrations of particles in solid, liquid, or gaseous materials.[7] Without a physical medium, sound waves cannot travel, as demonstrated by their inability to propagate through a vacuum. This principle forms the basis of the experiments conducted in this study. This set of activities introduces students to fundamental principles of sound – reflection, absorption, and propagation – through hands-on experiments using robotic tools. By engaging with these interactive experiments, students gain a deeper understanding of how sound behaves in different environments and materials. These concepts align with curriculum topics in physics and general science, particularly those involving mechanical waves, energy transfer, and material properties. The activities are designed for learners aged 11–14 with the following aims:
demonstrate how sound waves interact with different surfaces;
show how materials affect the transmission of sound;
encourage problem-solving and experimental design;
foster engagement with technology through simple robotics.
Safety notes
The safety of students is extremely important. Therefore, in the following experiments, we ensured that the sound levels remained below 60 dB.
Activity 1: Reflection of sound
Through this activity, students should understand that sound waves change direction, meaning that sound is reflected when it encounters a rigid, smooth surface. In this experiment, the sound produced by a portable speaker reflects off a hard, smooth surface, where it is detected by the robot’s sound sensor. This activity takes approximately 40 minutes, including setup and discussion.
Materials
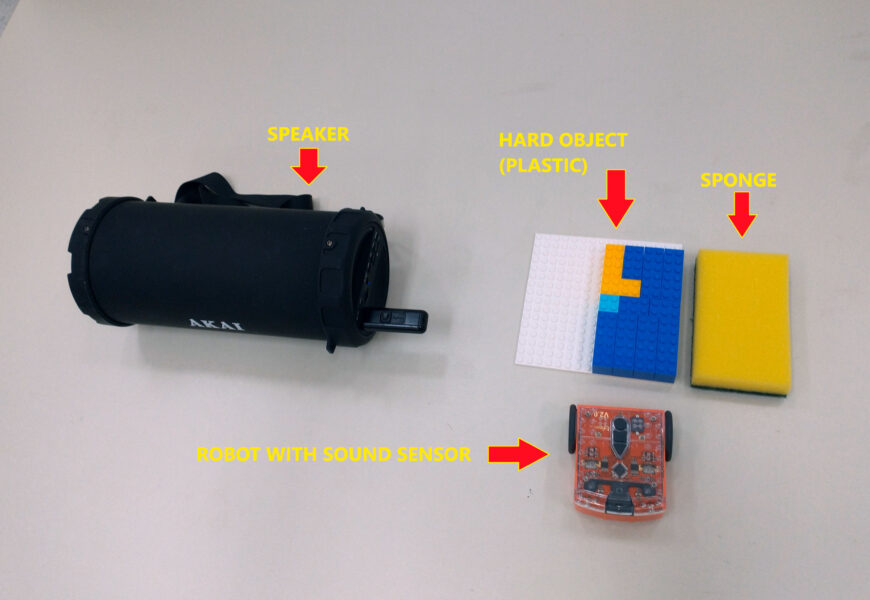
A programmable robot with sound-detection capabilities (e.g., Edison V2.0 robot or equivalent)
A tube portable speaker
USB stick with the sound file to be played by the portable speaker
Software to program the robot
Object(s) (e.g., a plastic container) to position the robot or sensor at the same height as the sound source
A rigid, smooth surface (e.g., a box with a glossy/hard surface). Materials that favour sound reflection are usually hard and smooth, as they do not absorb sound but rather reflect it. Examples include marble, glass, and metals such as aluminium and steel
Preparation
These steps can be done by the teacher before the lesson, but, ideally, the students should do this themselves since it’s an opportunity to integrate simple programming into the learning goals. If necessary, depending on the students’ knowledge level, this can be a separate lesson.
Prepare the robot or sound-detection system according to its operational instructions.
Program the robot or sound-detection system with appropriate software:
The device should remain on standby until a sound is detected.
When sound is detected, it should perform a sequence of actions, such as blinking lights or emitting a sound.
The system then reverts to standby mode.
Procedure
Students should work in small groups with guidance from the teacher. If there are not enough speakers, they can set everything up and then take turns using the speakers.
Connect the USB stick with the sound file to the speaker and turn the speaker on (but don’t turn on the sound yet).
Setup: place the speaker upright with the sound output directed upwards. Position the sound-detection system near the speaker at a similar height. We keep all the independent variables of the experiment constant (sound intensity, speaker position, robot position), except for one dependent variable – the presence or absence of the smooth surface. If we do not keep the abovementioned independent variables constant, then the robot’s perception or lack of perception of the sound may be due to the change in one of these variables rather than exclusively the presence or absence of the smooth, hard surface.
Figure 1: Experimental setup Image courtesy of the author
Initiate the system: activate the robot or detection system so that it enters standby mode.
Play the sound: begin sound playback. Initially, the detection system may not register the sound, as it travels upward.
Figure 2: In the absence of the hard, smooth surface, the sounds waves move upwards past the robot, which does not perceive the sound. Image courtesy of the author
Introduce the reflective surface: place a smooth, hard surface above the sound output at an angle directed toward the sound-detection system. The teacher should encourage students to place the object at different angles (toward the robot) each time, until the sound becomes perceptible and the robot reacts.
Figure 3: The smooth, hard surface is positioned to reflect the sound down to the robot. Image courtesy of the author
Observation: with the reflective surface in place, the sound waves change direction, travelling toward the detection system, which registers the sound and responds accordingly.
Encourage the students to reflect on and discuss the results. The guiding questions given below can be used.
Discussion
Guiding questions:
If we modify the placement angle of the object by increasing it significantly, what will happen?
If we modify the placement angle of the object by decreasing it significantly, what will happen?
Can you show with your finger the path the sound follows after it exits the speaker?
If we modify the placement angle of the object by increasing it significantly, what will happen?
If we modify the placement angle of the object by decreasing it significantly, what will happen?
Can you show with your finger the path the sound follows after it exits the speaker?
Without the reflective surface, the sound waves propagate upward and do not reach the detection system. When the reflective surface is introduced, sound waves reflect from the surface and are redirected toward the detection system, allowing it to register the sound. This demonstrates that rigid, smooth surfaces reflect sound waves, changing their direction of propagation.
Optional extensions
As an optional extension, the sound source can be placed horizontally on a hard surface, oriented towards a reflective surface, such as a smooth wall or a mirror, so that the students can investigate the path the sound waves take.
With the help of a protractor, students can record the angle of incidence of the sound wave – the angle at which the wave strikes the reflective surface.
Then, they measure the angle of reflection – the angle at which the sound wave bounces off the surface.
Students will observe that the angle of incidence is equal to the angle of reflection. This is a fundamental law of reflection, which applies not only to light but also to sound.
Through experimentation, students can also observe that, if the direction of the sound wave is reversed, it follows the same path backward. This principle is known as the principle of reversibility of sound waves.
In addition, we could use this setup with a horizontal speaker to demonstrate diffraction. We could place the source (tube portable speaker) horizontally on a desk. A narrow gap (between two hardback books) would allow sound waves to diffract around the books, allowing the sound to be detected by a robot placed offset on the other side, so that it is not directly in line with the gap. Learners can investigate diffraction with different widths of gap and draw conclusions from their observation.
Activity 2: Absorption of sound
Through this activity, students should understand that soft, porous materials absorb sound. Specifically, in this experiment, a sponge is used to absorb the sound waves produced by the portable speaker. This activity takes approximately 10 minutes (if the setup has already been assembled and tried in Activity 1).
Materials
A portable speaker
A programmable robot with sound-detection capabilities (e.g., Edison V2.0 robot or equivalent)
USB stick with the sound file to be played by the portable speaker
Prewritten program for a sound-responsive robotic tool
Object(s) (e.g., a plastic container) to position the sensor at the same height as the sound source
Smooth, hard surface (e.g., a box with a glossy/hard surface)
Soft, porous material (sponge) <1 cm thick
Procedure
Cut the sponge material so that it can be conveniently used to cover the flat, smooth surface used to reflect the sound.
Figure 4: Soft, porous material (sponge) covering the smooth surface Image courtesy of the author
The initial setup is the same as that used for Activity 1 (figure 1).
Demonstrate the reflection of sound by the smooth surface as in steps 1–5 of Activity 1.
Introduce an absorptive surface: cover the reflective surface with the sponge. The sponge should completely cover the side facing the speaker. It can be helpful to tape it in place.
Figure 5: The reflective surface is completely covered by the sponge. Image courtesy of the author
Repeat the experiment with the sponge-covered surface, trying the same angles and distances as before.
Figure 6: When the reflective surface is covered by the sponge, the sound waves don’t reach the robot. Image courtesy of the author
Observation: when the sponge-covered side of the box is positioned above the sound output, the sound waves are absorbed, and the sensor does not detect the sound.
Discussion
At the beginning of the experiment, in the absence of the smooth, hard surface, the sound continues its path upwards toward the ceiling, and consequently, the sensor does not detect it. When we introduce the smooth, hard surface, the incident sound waves change direction (they are not absorbed but reflected) and are directed toward the sensor, which detects them. In contrast, when the experiment is repeated with the side of the box covered with the sponge, the sensor does not detect the sound because the sound is absorbed by the sponge. Therefore, soft, porous materials absorb sound.
Activity 3: Sound propagation in solids and air
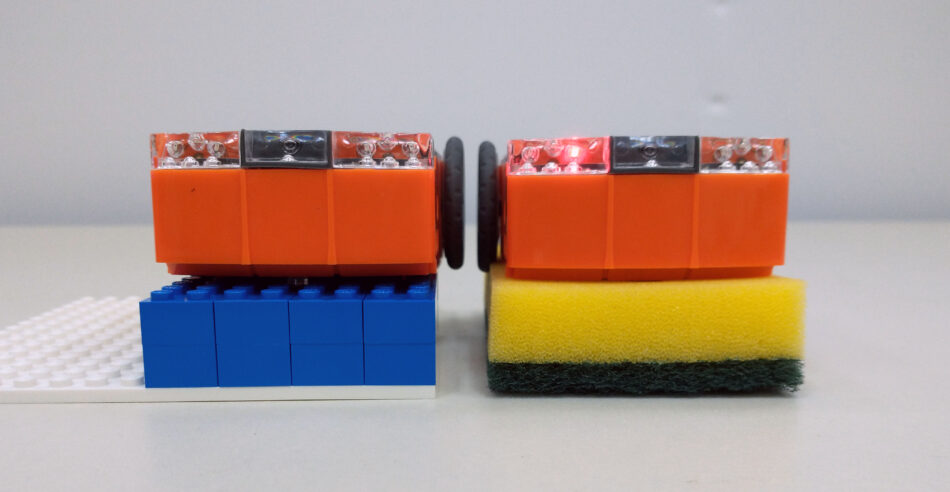
Through this activity, students should understand that sound propagates more easily through solid materials than air. Specifically, in this experiment, two different surfaces – bases made of different materials – are utilized: one hard (plastic) and one soft (sponge). We observe that sound propagates more easily through solids than through gases. This activity takes approximately 20 minutes.
Materials
Portable tube speaker
A programmable robot with sound-detection capabilities (e.g., Edison V2.0 robot or equivalent)
USB stick with the sound file to be played by the portable speaker
Prewritten program for a sound-responsive robotic tool
Kitchen cleaning sponge
A hard object with the same dimensions as the sponge (e.g., Lego bricks with the same area and height as the sponge)
Procedure
Prepare the robot and speaker as for the previous activities.
Prepare a hard object that is the same size (especially height) as the sponge.
Figure 7: The hard plastic object has the same dimensions as the sponge. When placed on the sponge or hard object, the robot should be at the same height. Image courtesy of the author
Place the speaker horizontally on a hard surface (e.g., a table). Position the hard object (e.g., Lego construction) in front of the sound output.
Figure 8: Experimental setup. Both the sponge and hard object are shown here, but, during the experiment, either the hard object or the sponge is placed in front of the speaker with the robot on top of it. Image courtesy of the author
Place the robot on the sponge.
Activate the sensor, initiate the system, and activate the robot or detection system. The robotic tool will remain inactive until it detects sound.
Play the sound: press the play button on the speaker. Reduce the sound volume just until the robot no longer reacts (i.e., the intensity is too low for the sound waves to reach the robot through the air).
Turn off the sound.
Replace the sponge with the hard object, and place the robot on top of it. Ensure the robotic tool’s position, in terms of height, does not change compared to when it was on the hard object.
Turn the sound back on.
Observation: the robotic tool should detect the sound and react.
If desired, check the result by going back to the sponge. The robot should not react.
Encourage the students to reflect on and discuss the results. The guiding questions given below can be used.
Discussion
Guiding questions:
How do you think the robot perceives sound when placed on the table?
What happens if you lift the robot into the air and place it in the same position? Does it still detect the sound? Why or why not?
Can you describe other real-life examples where sound vibrations travel more effectively through solids than through air?
Why might some sounds seem louder or clearer when touching a solid object instead of relying on the air alone?
What role does intensity play in how sound reaches the robot? Would increasing the volume change what happens?
When the robot is on the sponge, it does not detect the sound. The sound intensity is too low to reach it at detectable levels through the air and the sponge absorbs the vibrations from the table, preventing detection. In contrast, when it is placed on the hard surface, it detects the sound because of the vibrations transmitted to it through the desk (solid) and solid object rather than through the air.
These experiments illustrate that sound propagates more effectively through solids than gases. Vibrations through solid media significantly enhance detection compared to sound waves traveling through air alone.
Conclusion
By utilizing interactive experiments, students can explore the principles of sound reflection, absorption, and propagation. These activities enhance an understanding of acoustic principles and foster hands-on learning experiences, which are engaging and suitable for primary and secondary education. The use of robotic tools further facilitates active participation and curiosity in STEM learning.
Real-world examples
It is also interesting to link the principles students have explored to real-world applications, which students can research and present. Examples include:
Acoustic design: theatres, concert halls, and other performance spaces are often shaped and equipped with features (architectural and installed) to prevent sound distortion and ensure that people at the back can still hear clearly. If you can visit such a space, you might be able to see examples of such features. Sound-absorbing materials are also in cinemas and offices to reduce echo and noise, and wavy foam walls are often used in recording studios to help reduced unwanted reflection and improve recording quality.
Echoes: when we shout in a valley or a large, enclosed space, the sound reflects off surfaces and returns to us. This kind of sound reflection is the basis for echolocation, as used by bats and other animals, and the very efficient sound reflection that takes place in water forms the basis of sonar, which is used in submarines and ships to detect objects and map the sea floor.
Ultrasound imaging: also called sonography, this diagnostic technique allows imaging of soft tissues in the body based on the propagation of sound waves inside the body. The most well-known example is prenatal ultrasound, where foetuses are imaged in the womb.
Musical instruments: the way sound travels through different materials used for musical instruments, for example, the wood chosen for violins, affects the tone and volume.
Sound transmission through solids: if we place our ear against a surface, we can hear sounds (like someone tapping it gently) traveling through it more clearly than through the air. This effect can be demonstrated with string telephones and is the basis for bone-conduction hearing devices and headphones.
Explore how the reflection, absorption, and transmission of light influences the perception of colours: Félix RC, Paleček D, Correia TM (2024) Colour science with lasers, gummy bears, and rainbows. Science in School66.
Combine physics, programming, and art and design in a creative project to design a smart lamp: Gajić B et al. (2022) Design and build a smart lamp. Science in School60.
Read about how a school ambient air monitoring network detected a pressure wave from a volcano explosion: Barradas-Solas F, Blanco-Gil R (2022) Shaken by the (pressure) waves. Science in School57.
Learn about a technique based on the photoacoustic effect that could make medical safer: Czuchnowski J, Prevedel R (2019) Photoacoustics: seeing with sound. Science in School47: 14–18.
Read about the PhET website and the use of virtual labs in science classes: Senapati S (2021) Virtual labs, real science. Science in School52.